IT评测·应用市场-qidao123.com
标题:
Universal_Robots_ROS2_Driver实现UR机械臂仿真控制(3)-双臂驱动(节点图 ,
[打印本页]
作者:
盛世宏图
时间:
2025-3-11 11:23
标题:
Universal_Robots_ROS2_Driver实现UR机械臂仿真控制(3)-双臂驱动(节点图 ,
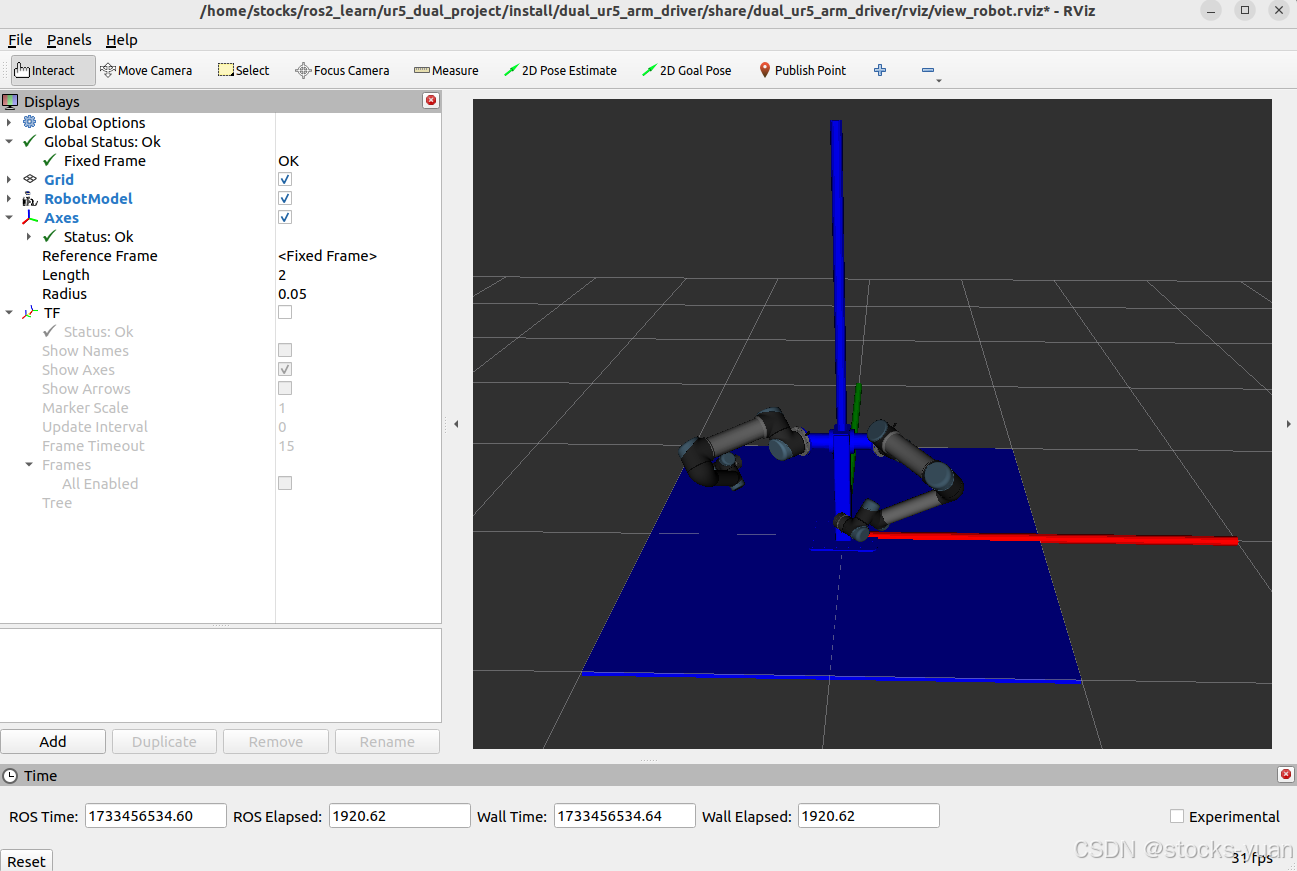
双臂机器人Moveit2轨迹规划
目次
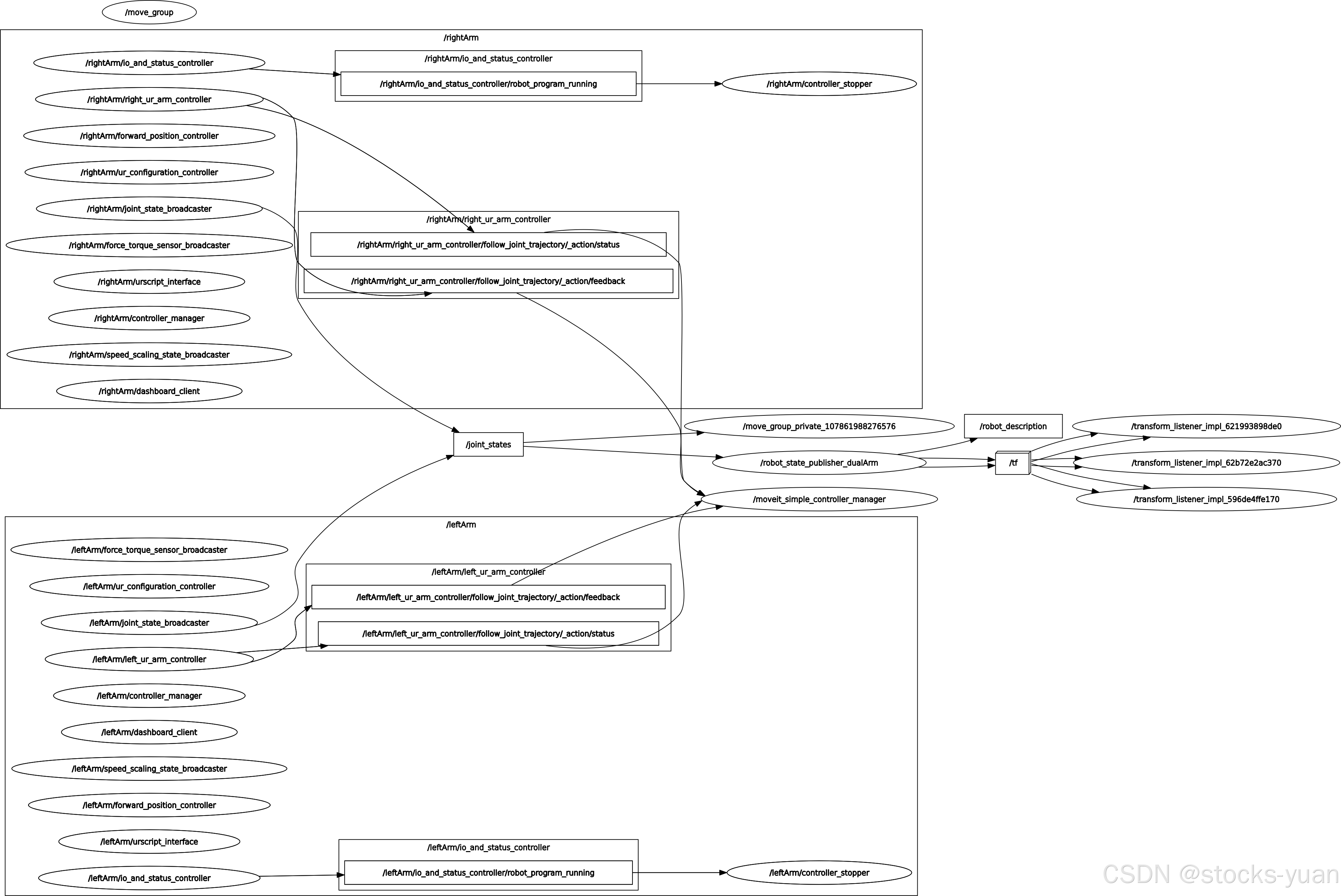
1.节点图
2. 网络层通讯 (IP)架构
ursim配置
3.控制体系通讯架构
现在现有架构
新型架构
Ethernet与EtherCAT对比
及时性
数据传输服从
网络拓扑
成本与复杂度
应用场景
可靠性与容错本领
1.节点图
2. 网络层通讯 (IP)架构
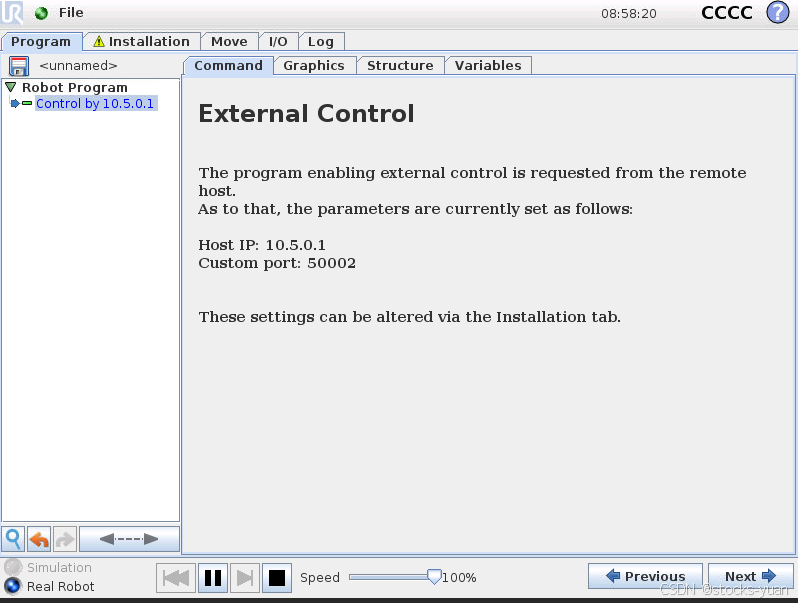
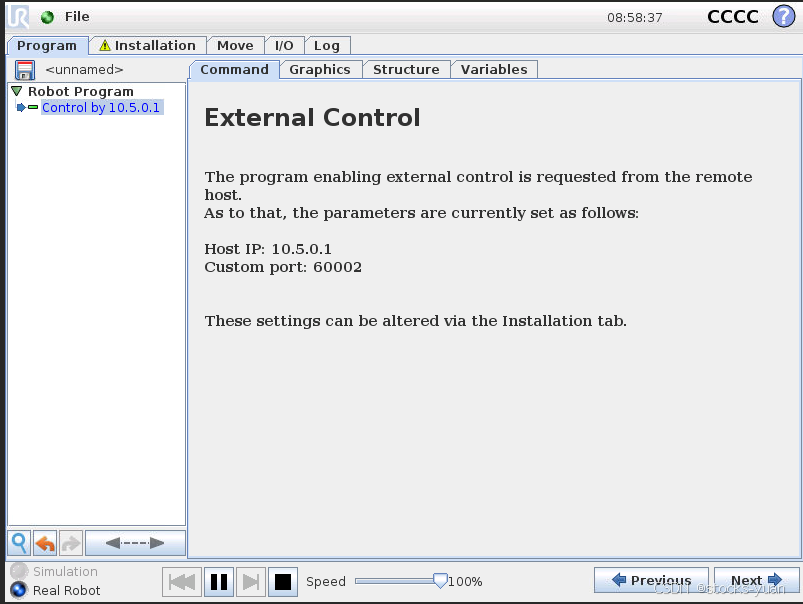
这里使用Docker compose实现同时运行两个ursim容器,实现宿主机与双臂容器通讯,具体通讯架构看下图:
ursim配置
3.控制体系通讯架构
本章节引用自知乎文章《通用机器人控制器ROS驱动包》,作者:韩冰
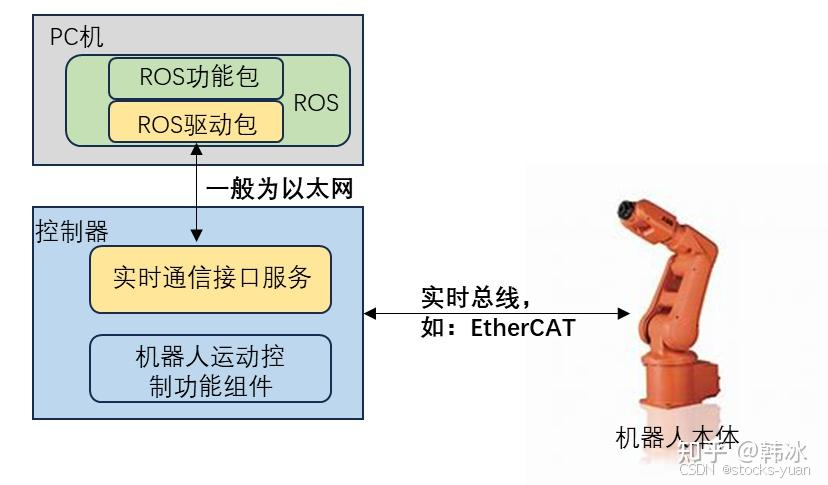
现在现有架构
现在市面上现有的多数机器人也支持ROS,方案上一样平常采用ROS与机器人控制器分离的方式,由控制器提供周期通讯接口(如:ABB的egm、KUKA的RSI、UR的RTDE),PC机上运行ROS并安装基于控制器提供的通讯接口封装的ROS驱动包,架构如下图所示:
该方案虽然被多数商用机器人采用,但存在以下几方面问题:
(1)通讯频率受限于机器人控制器提供的通讯频率,如:ABB、KUKA最高250hz、URe系列最高500hz、franka最高1khz(存在丢包环境);
(2)PC机需要一定的及时性,难以保证与机器人控制器可靠的及时通讯;
(3)不同品牌的机器人ROS驱动包配置、启动方式各不相同,不同品牌的多机扩展未便。
(4)商用机器人提供的周期通讯接口的数据经过二次插补、平滑滤波等操纵,机器人实行的数据与盼望数据存在弊端,难以保证高频多轴数据同步。
由于商用机器人不允许用户对控制器二次开发,用户只能使用这种方式
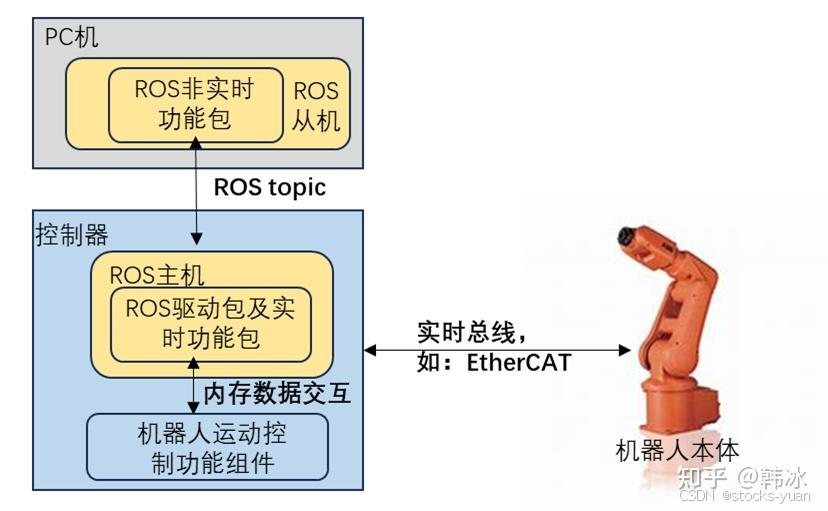
新型架构
不同于上述方案,
本体系将ROS驱动包下沉到机器人的控制器中,且利用通用机器人提供的开发接口封装,数据直接内存交互(共享内存),无需网络通讯,充分保证ROS驱动包的及时性。
ROS驱动包与控制器一样平常都是一定频率下的同步通讯,驱动包下沉后才能满足高频的同步通讯需求。
以太网作为通用网络通讯协议,难以满足高频通讯的要求,而驱动包下沉控制器后,节点(历程)之间可以通过
共享内存
或
消息通讯
的方式实现快速通讯。
本体系采用ROS主从机的方式,机器人控制器作为ROS主机,运行ROS的及时节点;PC机作为ROS从机,运行ROS的非及时节点;ROS主从机之间采用用ROS topic实现便捷通讯。由于本ROS驱动包与机器人控制体系深入融合,可实现1khz及以上通讯频率的可靠驱动,且数据无二次处理,最大限度的保证盼望数据的真实,可以实现高频多轴数据同步。
同时ROS及时节点运行于机器人控制器中采用内存通讯,非及时节点运行于PC机中,即提高了ROS的通讯及时性,又降低了PC机的及时性要求。另外借助通用机器人控制器的多机、多构型控制本领,在不改变ROS驱动及使用方式的环境下,可快速实现不同构型、不同数量机器人的控制。方案架构图如下:
Ethernet与EtherCAT对比
以太网 (Ethernet):
是一种
通用的网络通讯协议
,用于构建局域网 (LAN)。以太网重要用于企业、家庭网络和数据中心,支持设备间数据传输。
EtherCAT:
是
基于以太网的及时工业现场总线协议
,由Beckhoff开发。它针对工业主动化场景进行了优化,得当高性能、低耽误的控制应用。
协议
以太网 (Ethernet)
EtherCAT
及时性
一样平常
强及时性
服从
较低
高效
拓扑布局
星型、树型
线型、环型、树型
应用场景
普通网络
工业主动化
容错本领
一样平常
高容错性
及时性
以太网:
尺度以太网协议(如TCP/IP)计划时更注意通用性,及时性能有限。数据帧会通过互换机或路由器转发,可能引入不可预测的耽误。
EtherCAT:
具有极强的及时性。通过“主站-从站”模式,EtherCAT帧在一个循环中依次穿过从站设备,
支持短周期时间(乃至小于100µs)
,非常得当需要高精度、及时控制的应用。
数据传输服从
以太网:
每个数据包都会有额外的开销(如TCP/IP头部),
在小数据量传输中服从较低
。
EtherCAT:
将数据直接嵌入一个连续的帧中,
从站设备只处理属于自己的部分
,大幅减少了协议开销和时间浪费,提升了服从。
网络拓扑
以太网:
通常使用星形或树形拓扑,设备通过互换机互联,复杂度和成本随节点数增加。
EtherCAT:
支持多种拓扑布局,包罗线型、环型和树型。线型拓扑是最常见的,布线简单,节点数多时仍旧保持高性能。
成本与复杂度
以太网:
通用硬件(如尺度网卡和互换机)即可摆设,成本低,但缺乏及时控制功能。
EtherCAT:
需要专用的控制器(主站)和支持EtherCAT协议的从站设备。设备成本较高,配置复杂度较大,但得当工业场景。
应用场景
以太网:
实用于
普通数据传输场景
,如办公网络、互联网接入、多媒体传输等。
EtherCAT:
重要应用于
工业主动化控制范畴
,如机器人控制、运动控制体系、数控机床等,需要高精度、低耽误的及时通讯。
可靠性与容错本领
以太网:
依靠于互换机和路由器的可靠性
,出现故障时可能影响网络部分或团体。
EtherCAT:
提供内置诊断功能,环型拓扑还支持冗余模式,即使某一节点或链路出现问题,网络通讯也能继续。
免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作!更多信息从访问主页:qidao123.com:ToB企服之家,中国第一个企服评测及商务社交产业平台。
欢迎光临 IT评测·应用市场-qidao123.com (https://dis.qidao123.com/)
Powered by Discuz! X3.4