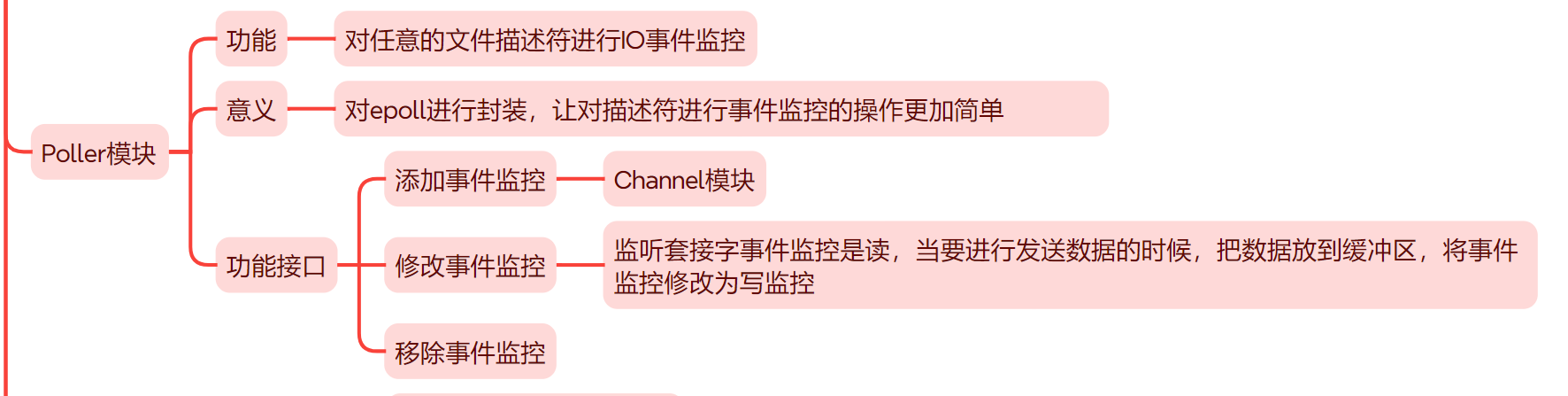
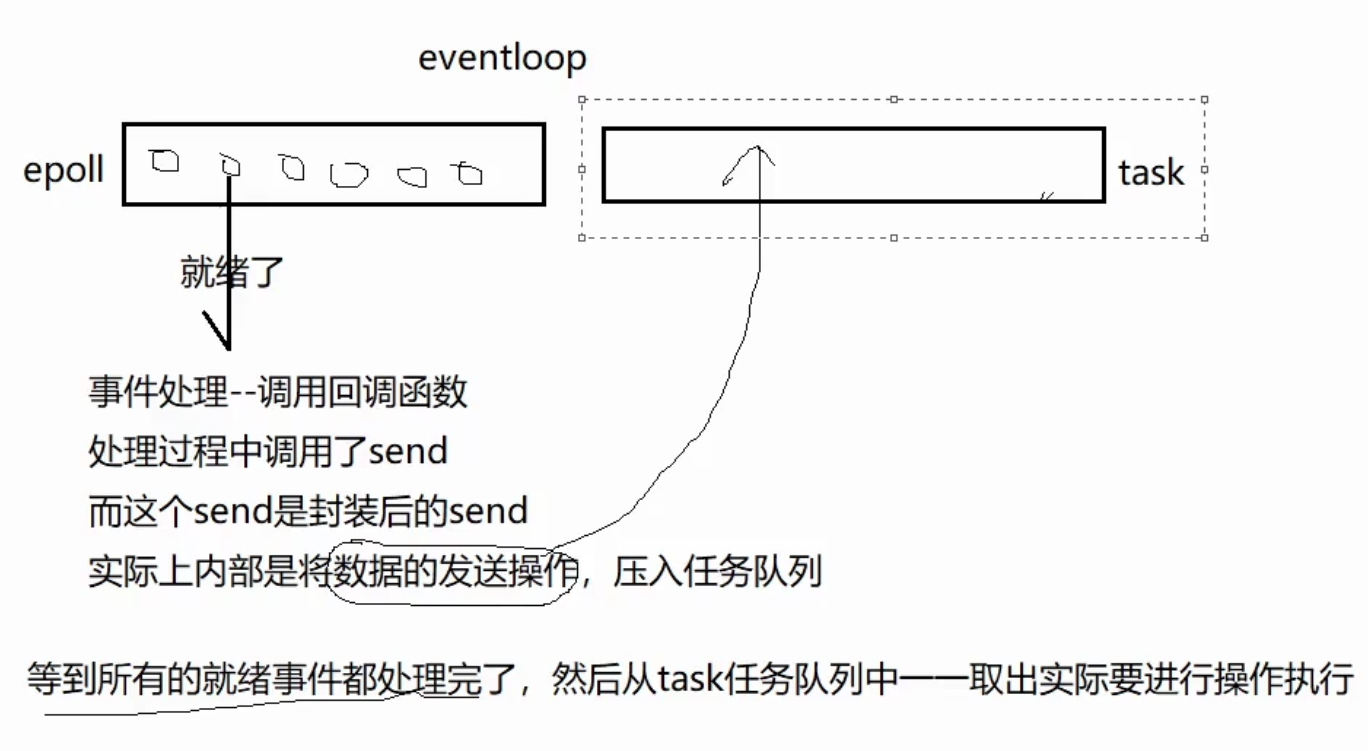
 oller类调用epoll_wait函数进入轮询状态,等候文件形貌符上的事件发生。当有事件发生时,Poller 会获取到就绪的文件形貌符列表,并根据文件形貌符找到对应的Channel对象。oller会调用 Channel 对象的SetREvent方法设置现实触发的事件,然后将Channel对象添加到活泼列表中。最后,用户可以从活泼列表中取出Channel对象,并调用其Handlevent方法处理事件。
oller类调用epoll_wait函数进入轮询状态,等候文件形貌符上的事件发生。当有事件发生时,Poller 会获取到就绪的文件形貌符列表,并根据文件形貌符找到对应的Channel对象。oller会调用 Channel 对象的SetREvent方法设置现实触发的事件,然后将Channel对象添加到活泼列表中。最后,用户可以从活泼列表中取出Channel对象,并调用其Handlevent方法处理事件。
| 欢迎光临 IT评测·应用市场-qidao123.com技术社区 (https://dis.qidao123.com/) | Powered by Discuz! X3.4 |