qidao123.com技术社区-IT企服评测·应用市场
标题:
履历:从CAN到以太网为主的车载网络架构升级
[打印本页]
作者:
涛声依旧在
时间:
4 天前
标题:
履历:从CAN到以太网为主的车载网络架构升级
引言
新能源汽车智能化与网联化的进程中,传统CAN总线已难以满足高带宽、低延迟的通信需求,
车载以太网
逐步成为新一代电子架构的核心骨干。本文基于工程实践,系统性剖析车载以太网的核心技术、协议栈、拓扑设计及工具链升级策略,助力开发者快速实现技术迁移。
随着智能驾驶、舱驾一体化和OTA升级的遍及,车载网络正面对
信号爆炸、跨域交互、安全冗余
三大核心挑衅。传统的CAN/LIN架构已无法支持,工程师需直面以下问题:
信号量级
:从数百条CAN信号到数千条以太网服务接口,如何管理?
跨域通信
:摄像头数据如何低延迟传输到座舱屏幕?
功能安全
:如何确保刹车信号在复杂网络中不被阻塞?
一、车载网络TOP20核心概念科普
CAN总线
界说
:控制器局域网,接纳差分信号传输,速率最高1Mbps,适用于实时控制(如动力系统)。
形象比喻
:如同“神经系统”,负责传递关键控制信号。
LIN总线
界说
:低速(20kbps)、低本钱总线,用于车门、座椅等非关键控制。
特点
:单主多从结构,布线简单但可靠性低。
FlexRay
界说
:高速(10Mbps)、高容错总线,支持双通道冗余,适用于线控底盘。
局限
:本钱高,渐渐被以太网替代。
车载以太网
界说
:基于100BASE-T1/1000BASE-T1的单对双绞线技术,速率达1Gbps+,支持全双工通信。
优势
:带宽高、重量轻、EMC抗干扰强。
总线型拓扑
结构
:所有节点共享一条总线(如CAN)。
缺点
:单点故障风险,带宽受限。
星型拓扑
结构
:中央交换机连接各域控制器(如以太网骨干)。
优势
:高带宽、故障隔离。
地区控制器架构
界说
:将ECU按物理位置分组,通过地区控制器聚合信号,减少线束复杂度。
案例
:特斯拉Model 3接纳此架构,线束减少50%。
AUTOSAR
界说
:汽车开放系统架构,标准化ECU软件接口,分CP(Classic Platform)和AP(Adaptive Platform)。
CP
:基于C语言,用于MCU(如车身控制)。
AP
:基于C++,支持SOA(面向服务架构),用于高性能SOC(如自动驾驶)。
SOME/IP
界说
:面向服务的中心件协议,支持事件关照、远程过程调用(RPC),用于以太网服务通信。
应用场景
:ADAS传感器数据发布、座舱服务交互。
DoIP
界说
:基于IP的诊断协议,支持UDS服务,用于OTA升级和ECU刷写。
优势
:相比CAN诊断,带宽提升百倍。
TSN(时间敏感网络)
核心协议
:gPTP(时间同步)、AVTP(音视频传输)、802.1Qbv(流量调理)。
作用
:确保自动驾驶传感器数据低延迟、确定性传输。
MACsec
界说
:基于MAC层的加密技术,保障车载以太网数据完整性及来源真实性。
应用
:防止ECU通信被篡改(如刹车信号劫持)。
功能安全(ISO 26262)
要求
:ASIL品级划分(A-D),车载网络需满足ASIL-B以上。
实现
:冗余设计、故障注入测试。
Wireshark
作用
:抓包分析SOME/IP、DoIP报文,需安装专用插件。
Vector CANoe
功能
:支持肴杂总线(CAN+以太网)仿真,自动化测试协议交互。
二、车载以太网与CAN总线的本质差异
1. 物理层对比
特性
CAN总线
车载以太网
线缆类型
双绞线(CAN_H/CAN_L)单对非屏蔽双绞线(100Base-T1)
速率
最高1 Mbps100 Mbps~10 Gbps
通信方式
半双工(需仲裁)全双工(无辩论)
拓扑结构
总线型(共享带宽)星型/树型(交换机分配带宽)
2. 协议栈分层
CAN协议栈:
┌──────────────┐
│ 应用层 (J1939) │
└──────────────┘
│ 数据链路层 (CAN帧) │
└──────────────┘
│ 物理层 (双绞线) │
└──────────────┘
车载以太网协议栈:
┌──────────────────┐
│ 应用层 (SOME/IP/DoIP) │
├──────────────────┤
│ 传输层 (TCP/UDP) │
├──────────────────┤
│ 网络层 (IPv4/IPv6) │
├──────────────────┤
│ 数据链路层 (MAC/TSN) │
├──────────────────┤
│ 物理层 (100Base-T1) │
└──────────────────┘
复制代码
3.通信协议栈:从“能用”到“可靠”
场景
协议
可靠性设计
工具支持
实时控制
CAN FD + TTCAN时间触发调理,避免总线仲裁辩论CANoe TTCAN插件
跨域服务通信
SOME/IP + DDSQoS策略(如重试、超时、优先级)RTI Connext DDS
高带宽流媒体
AVTP + TSN时间感知整形(IEEE 802.1Qbv)Spirent TestCenter
诊断与OTA
DoIP + UDS多会话并行、断点续传Vector vFlash + ODX Studio
4.车载以太网与普通TCP/IP的工程差异
1. 协议栈优化
普通TCP/IP协议栈:
应用层 ─ HTTP/FTP
传输层 ─ TCP/UDP
网络层 ─ IP
链路层 ─ Ethernet MAC
车载以太网协议栈:
应用层 ─ SOME/IP/DoIP
传输层 ─ TCP/UDP + TSN扩展
网络层 ─ IP + 安全路由
链路层 ─ TSN MAC + 时间同步
复制代码
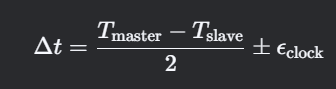
2. 时间同步公式
车载以太网gPTP时间同步精度计算:
此中:
Tmaster:主节点时间戳
ϵclock:时钟漂移毛病(通常<100ns)
三、AUTOSAR协议栈:车载通信的标准化基石
1、AUTOSAR协议栈概述
AUTOSAR
(AUTomotive Open System ARchitecture)是一种开放的汽车电子系统架构标准,旨在实现软硬件解耦、模块化开发及跨平台复用。其协议栈是AUTOSAR标准的核心组成部分,为车载网络通信提供标准化接口和功能实现。
核心目标
标准化通信接口
:统一差异总线(CAN/LIN/以太网)的通信协议,低沉ECU开发复杂度。
支持多总线协同
:通太过层设计实现CAN、LIN、FlexRay、车载以太网的肴杂通信。
功能安全与实时性
:满足ISO 26262 ASIL品级要求,确保关键控制信号简直定性传输。
2、AUTOSAR协议栈分层架构
AUTOSAR协议栈遵照分层模型,从底层硬件驱动到上层应用服务逐级抽象:
|------------------------------|
| Application Layer | -- 用户自定义应用(如BMS控制逻辑)
|------------------------------|
| RTE (Runtime Env.) | -- 提供应用与底层通信的标准化接口
|------------------------------|
| Communication Stack | -- 协议栈核心,包含以下子模块:
| |------------------------| |
| | Service Layer | -- 诊断(UDS)、网络管理(NM)、通信管理(Com)
| |------------------------| |
| | Transport Layer | -- 协议数据单元(PDU)的路由与分片
| |------------------------| |
| | Network Layer | -- 网络协议(IP、SOME/IP、DoIP)
| |------------------------| |
| | Data Link Layer | -- 数据链路控制(CAN/LIN/Ethernet MAC)
| |------------------------| |
| | Driver Layer | -- 硬件驱动(CAN控制器、以太网PHY芯片)
|------------------------------|
| Microcontroller | -- 硬件层(MCU、通信控制器)
|------------------------------|
复制代码
3、核心模块详解
1. 通信管理模块(Communication Stack)
PDU Router(协议数据单元路由)
功能
:负责差异总线间PDU的转发与映射(如CAN信号 → 以太网SOME/IP服务)。
应用场景
:中央网关将CAN帧转换为以太网报文时,PDU Router界说信号映射规则。
Transport Layer(传输层)
协议支持
:
CAN Transport Layer
:支持UDS over CAN的多帧传输(ISO 15765-2)。
IP Transport Layer
:支持TCP/UDP分片与重组(用于DoIP、SOME/IP)。
2. 服务层(Service Layer)
诊断服务(Diagnostic)
协议
:UDS(Unified Diagnostic Services)基于CAN或DoIP(Diagnostic over IP)。
功能
:故障码读取(DTC)、ECU刷写、参数设置。
工具链
:Vector CANdela(界说诊断数据库CDD文件)。
网络管理(Network Management, NM)
功能
:控制ECU的睡眠/叫醒状态,优化整车功耗。
模式
:
CAN NM
:基于周期性网络管理报文(0x4xx系列ID)。
Ethernet NM
:基于AUTOSAR NM over IP(通过UDP广播)。
通信管理(Communication Manager, Com)
功能
:管理信号发送周期、超时检测、信号组过滤。
设置方式
:通过ARXML文件界说信号属性(如周期、初始值)。
3. 网络协议集成
车载以太网协议支持
TCP/IP协议栈
:基于AUTOSAR标准实现IPv4/IPv6、TCP、UDP。
SOME/IP协议栈
:
服务发现(SD)
:动态注册与订阅服务(如ADAS传感器数据发布)。
序列化(Serialization)
:将数据结构转换为二进制流(雷同DBC信号编码)。
DoIP协议栈
:支持ISO 13400标准,实现基于IP的诊断通信。
传统总线协议支持
CAN协议栈
:支持经典CAN/CAN FD,兼容J1939、ISO-TP。
LIN协议栈
:支持LIN 2.x协议,主节点调理表设置。
4、AUTOSAR协议栈在车载网络中的典型应用
1. 跨总线信号转发(CAN ↔ 以太网)
场景
:BMS通过CAN发送电池数据 → 网关转换为SOME/IP服务 → 动力域控制器接收。
实现步骤
:
信号界说
:在ARXML中界说CAN信号(DBC兼容)与SOME/IP服务接口。
路由设置
:使用PDU Router将CAN PDU映射到SOME/IP PDU。
序列化处理处罚
:通过SOME/IP协议栈将信号值序列化为二进制负载。
2. 肴杂诊断(DoIP + UDS over CAN)
场景
:通过以太网诊断域控制器(DoIP),同时通过CAN诊断电机控制器(UDS)。
实现方式
:
DoIP模块
:处理处罚TCP连接、诊断会话管理(0x10服务)。
CAN Transport Layer
:拆分多帧UDS请求(如0x34服务刷写固件)。
3. 时间敏感网络(TSN)支持
协议集成
:通过AUTOSAR Ethernet Stack扩展TSN协议(如gPTP、AVTP)。
设置示例
:
gPTP同步
:在ARXML中设置时间同步域(Domain ID)与优先级。
AVTP流预留
:通过协议栈预留带宽,确保摄像头数据低延迟传输。
4、学习资源推荐
官方文档
:
AUTOSAR Classic Platform Specification(重点阅读Communication Stack章节)。
AUTOSAR Ethernet Stack Specification。
实践工具
:
Vector免费版CANoe(支持基础AUTOSAR仿真)。
Wireshark SOME/IP插件(分析以太网通信)。
行业案例
:
特斯拉域控制器中的AUTOSAR应用(公开技术报告)。
博世/大陆的AUTOSAR协议栈白皮书。
四、AUTOSAR与车载以太网的结合优势
服务化架构(SOA)支持
:通过SOME/IP实现松耦合服务交互(如ADAS感知数据订阅)。
高带宽利用
:以太网协议栈支持大数据传输(如OTA升级包、摄像头原始数据)。
功能安全
:协议栈内置安全机制(如CRC校验、冗余路由),满足ASIL-D要求。
1. 车载以太网中的AUTOSAR实践
协议栈集成
:
SOME/IP集成
:AUTOSAR AP通过SOME/IP实现服务发现与RPC,支持ADAS多传感器协同。
TSN支持
:AUTOSAR AP适配gPTP协议,确保时间同步精度<1μs。
网关设计
:
信号转换
:AUTOSAR网关将CAN帧封装为SOME/IP服务,减少骨干网负载。
安全隔离
:通过VLAN划分差异安全域(如动力控制与信息娱乐)。
2. 挑衅与趋势
性能瓶颈
:AUTOSAR CP无法满足高算力需求,AP渐渐成为主流。
开源替代
:ROS 2、DDS等中心件在自动驾驶领域与AUTOSAR竞争。
五、车载网络拓扑设计:经典与创新并存
1. 主流拓扑对比
拓扑类型
结构示意图
核心特点
典型总线
车载应用场景
总线型
ECU1—ECU2—ECU3- 所有节点共享一条总线
- 低本钱、易扩展
- 辩论需仲裁(如CAN的CSMA/CA)CAN、LIN车身控制、动力系统
星型
ECU1—[Hub]—ECU2- 中心节点(交换机/网关)集中管理
- 高可靠性(单点故障隔离)
- 布线复杂车载以太网域控制器互联(ADAS、座舱)
树型
ECU1—[Hub]—[SubHub]—ECU2- 分层扩展(骨干+分支)
- 带宽按需分配
- 故障排查复杂车载以太网、CAN FD中央网关+地区控制器架构
菊花链
ECU1→ECU2→ECU3- 节点串联,数据逐级传递
- 布线简单、延迟累积
- 单点故障导致链路停止LIN、FlexRay车门控制、座椅调治
环形
ECU1→ECU2→ECU3→ECU1- 冗余路径(双向环)
- 高容错性
- 协议复杂(需令牌管理)FlexRay、MOST高端车型的娱乐系统(已渐渐被以太网替代)
网状
ECU1↔ECU2↔ECU3- 多路径互联
- 高冗余、低延迟
- 本钱高、协议复杂无线通信(V2X)车联网(V2V、V2I)
2.未来趋势:地区架构与TSN
1.中央计算+地区控制(蔚来ES8方案)
传统架构(分布式ECU):
[ECU1]-[ECU2]-[ECU3]---(信号杂乱耦合)
现代架构(域集中+区域控制):
[中央计算单元]
│
├─[智驾域]---(以太网骨干,TSN调度)
├─[座舱域]---(服务化接口,SOME/IP)
└─[区域控制器]---(CAN/LIN聚合)
│
├─[左车身]---(车门/灯光LIN子网)
└─[右车身]---(座椅/空调CAN子网)
复制代码
[中央超算平台]
│
├─[智能驾驶]---(10G以太网)
├─[智能座舱]---(TSN AVB)
└─[区域网关]---(CAN FD Backbone)
│
├─[前区域]---(激光雷达/摄像头)
└─[后区域]---(底盘/动力)
复制代码
优势
:
信号聚合
:地区控制器将CAN/LIN信号打包为以太网服务,减少骨干网负载。
故障隔离
:单地区故障不影响全局(如右车身CAN短路,左车身仍可工作)。
量产案例
:
特斯拉Model 3
:通过地区控制器(Body Controller)整合车门、充电口等信号,线束减少50%。
蔚来ET7
:中央网关+地区控制器实现毫秒级跨域信号转发。
2. 无线通信:剪掉末了一根线
场景
:
V2X
:通过5G C-V2X实现车路协同,减少本地感知依赖。
无线BMS
:宁德时代CTP3.0技术,电池包内部无线通信。
3. TSN技术矩阵
协议
功能
延迟要求
gPTP时间同步<1μsAVTP音视频流传输<2ms802.1Qbv时间感知调理微秒级
六、工具链升级:从CAN到以太网的实战指南
1. 硬件工具升级路径
功能需求
传统CAN工具
车载以太网工具
物理层接口UNScanFD-200UTC1054 Pro(支持T1/CAN FD肴杂)协议分析CANalyzerWireshark + SOME/IP插件高精度时间同步-Keysight示波器 + gPTP同步模块
2. 软件工具链对比
+---------------------+---------------------+-----------------------+
| **功能** | **CAN工具** | **以太网工具** |
+---------------------+---------------------+-----------------------+
| 协议仿真 | CANoe (CAPL) | CANoe Ethernet Option|
| 诊断刷写 | vFlash (CAN) | INCA (DoIP) |
| 自动化测试 | CANoe Test Module | Python + SOME/IP Lib |
+---------------------+---------------------+-----------------------+
复制代码
设计工具
:
Vector DaVinci
:设置ARXML文件,界说通信矩阵、服务接口。
ETAS ISOLAR
:AUTOSAR架构设计与代码生成。
测试工具
:
Vector CANoe
:仿真肴杂总线通信,验证协议栈交互逻辑。
Trace32
:调试AUTOSAR协议栈底层驱动(如以太网MAC驱动)。
七、总结与学习资源
1. 核心 结论
技术迁移
:优先升级肴杂总线硬件(如TC1054 Pro),逐步适配AUTOSAR协议栈。
测试重点
:TSN实时性、EMC抗干扰、跨总线信号同等性。
未来布局
:地区架构+TSN是智能驾驶的核心通信底座。
2. 推荐资源
书籍
:《AUTOSAR规范解读》《车载以太网权势巨子指南》
工具
:Vector CANoe(以太网插件)、Wireshark SOME/IP剖析器
社区
:AUTOSAR官网、OPEN Alliance技术白皮书
立即行动
:从升级肴杂总线分析仪(如同星TC1054 Pro)开始,迈出征服复杂网络的第一步!
版权声明
:原创内容,转载请注明出处。
互动提问
:接待在评论区留言探究车载网络设计中的具体挑衅!
免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作!更多信息从访问主页:qidao123.com:ToB企服之家,中国第一个企服评测及商务社交产业平台。
欢迎光临 qidao123.com技术社区-IT企服评测·应用市场 (https://dis.qidao123.com/)
Powered by Discuz! X3.4