ToB企服应用市场:ToB评测及商务社交产业平台
标题:
python-can模拟发送CAN FD总线信号
[打印本页]
作者:
杀鸡焉用牛刀
时间:
2022-8-9 14:39
标题:
python-can模拟发送CAN FD总线信号
目的:中间件将CAN总线信号转成dds信号发出,为测试中间件的准确性,模拟发送CAN信号,并模拟dds接收器接收信号,将发送和接收的数据比较
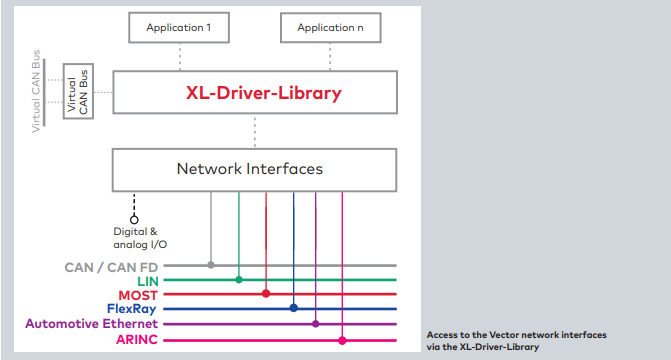
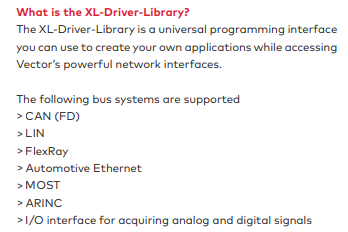
1.安装XL Driver Library,必须安装,里面包含各种网络接口,可上官网下载
XL Driver Library 20.30.14
通过XL-Driver-Library访问Vector网络接口
2.下载develop分支代码并安装
仓库:
https://github.com/hardbyte/python-can
3.安装python-can
Building & Installing
The project can be built with:
pip install wheel
python setup.py sdist bdist_wheel
复制代码
The project can be installed in editable mode with:
pip install -e .
复制代码
4.找到安装的python-can包,找到vector文件夹,修改vxlapi.py 140行
# CAN FD configuration structure
class XLcanFdConf(ctypes.Structure):
_fields_ = [('arbitrationBitRate', ctypes.c_uint), ('sjwAbr', ctypes.c_uint),
('tseg1Abr', ctypes.c_uint), ('tseg2Abr', ctypes.c_uint),
('dataBitRate', ctypes.c_uint), ('sjwDbr', ctypes.c_uint),
('tseg1Dbr', ctypes.c_uint), ('tseg2Dbr', ctypes.c_uint),
('options', ctypes.c_uint), # 手动增加
('reserved', ctypes.c_uint * 2)]
复制代码
5.修改canlib.py,新增加一个option参数
class VectorBus(BusABC):
"""The CAN Bus implemented for the Vector interface."""
deprecated_args = dict(
sjwAbr="sjw_abr",
tseg1Abr="tseg1_abr",
tseg2Abr="tseg2_abr",
sjwDbr="sjw_dbr",
tseg1Dbr="tseg1_dbr",
tseg2Dbr="tseg2_dbr",
)
@deprecated_args_alias(**deprecated_args)
def __init__(
self,
channel: Union[int, Sequence[int], str],
can_filters: Optional[CanFilters] = None,
poll_interval: float = 0.01,
receive_own_messages: bool = False,
bitrate: Optional[int] = None,
rx_queue_size: int = 2 ** 14,
app_name: Optional[str] = "CANalyzer",
serial: Optional[int] = None,
fd: bool = True,
data_bitrate: Optional[int] = None,
sjw_abr: int = 32,
tseg1_abr: int = 127,
tseg2_abr: int = 32,
sjw_dbr: int = 8,
tseg1_dbr: int = 31,
tseg2_dbr: int = 8,
option=0, # 手动增加
**kwargs: Any,
) -> None:
复制代码
8.搜索 self.canFdConf = vxlapi.XLcanFdConf() ,新增以下内容
if fd:
self.canFdConf = vxlapi.XLcanFdConf()
self.canFdConf.options = ctypes.c_uint(option) # 手动新增
复制代码
9.找到python-can的安装路径,在vector目录下修改canlib.py
参考:\venv\Lib\site-packages\can\interfaces\vector\canlib.py\
sjw_abr: int = 32,
tseg1_abr: int = 127,
tseg2_abr: int = 32,
sjw_dbr: int = 8,
tseg1_dbr: int = 31,
tseg2_dbr: int = 8,<br><br>
复制代码
bus = can.interfaces.vector.VectorBus(bustype='vector', app_name='CANalyzer', channel=2, bitrate=500 * 1000, data_bitrate=2000 * 1000, fd=True)
复制代码
在
User Manual
文档
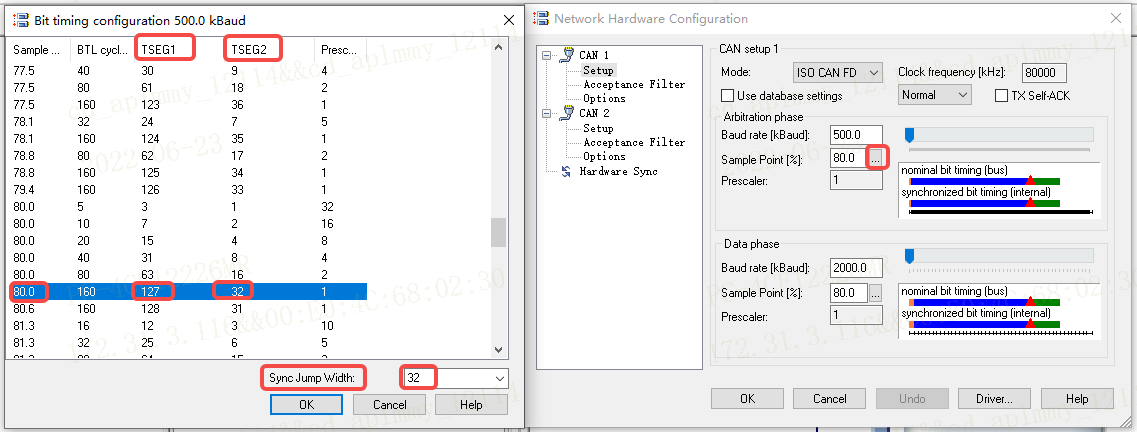
5.4.1 XLcanFdConf
章节的函数解释中可以看到
sample point
和sjw_abr、tseg1_abr、tseg2_abr的关系
打开本地CANoe -> CANFD工程 -> Network Hardware :
此时python-can发送CANFD信号已经完成,接下来完成
使用dds API接收dds信号
参考文档:
Short overview of facts
(PDF)
User Manual
(PDF)
python-can对Vector CAN FD(no-iso)的支持
免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作!
欢迎光临 ToB企服应用市场:ToB评测及商务社交产业平台 (https://dis.qidao123.com/)
Powered by Discuz! X3.4
 通过XL-Driver-Library访问Vector网络接口
通过XL-Driver-Library访问Vector网络接口