本文只发布于利用OpenCV实现尺度不变性与角度不变性的特征找图算法和知乎
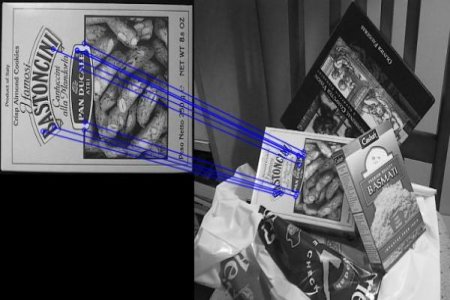
一般来说,利用OpenCV实现找图功能,用的比较多的是模板匹配(matchTemplate)。笔者比较喜欢里面的NCC算法。但是模板有个很明显的短板,面对尺度改变,角度改变的目标就无能为力了。因此本文旨在做到模板匹配做不到的这两点上。从特征匹配开始
当然也有人利用模板匹配实现上面的功能,但是方法之无语,效率之低下让我不禁想起了三体中的一句话:
“成吉思汗的骑兵,攻击速度与二十世纪的装甲部队相当;北宋的床弩,射程达一千五百米,与二十世纪的狙击步枪差不多;但这些仍不过是古代的骑兵与弓弩而已,不可能与现代力量抗衡。基础理论决定一切,未来史学派清楚地看到了这一点。而你们,却被回光返照的低级技术蒙住了眼睛。你们躺在现代文明的温床中安于享乐,对即将到来的决定人类命运的终极决战完全没有精神上的准备。”
本文并不涉及ORB或者BEBLID算法的具体实现,想了解的同学请移步论文。本文撰自一名非计算机系大一新生,有不到处还请见谅。
From https://zhuanlan.zhihu.com/p/91479558在2020年提出了一个效果更好也更快的特征描述算法Boosted Efficient Binary Local Image Descriptor(笔者不清楚他算法这有没有专利,但是这个算法在nonfree里,如果需要商业化请慎用,或者替换回BRIEF算法)

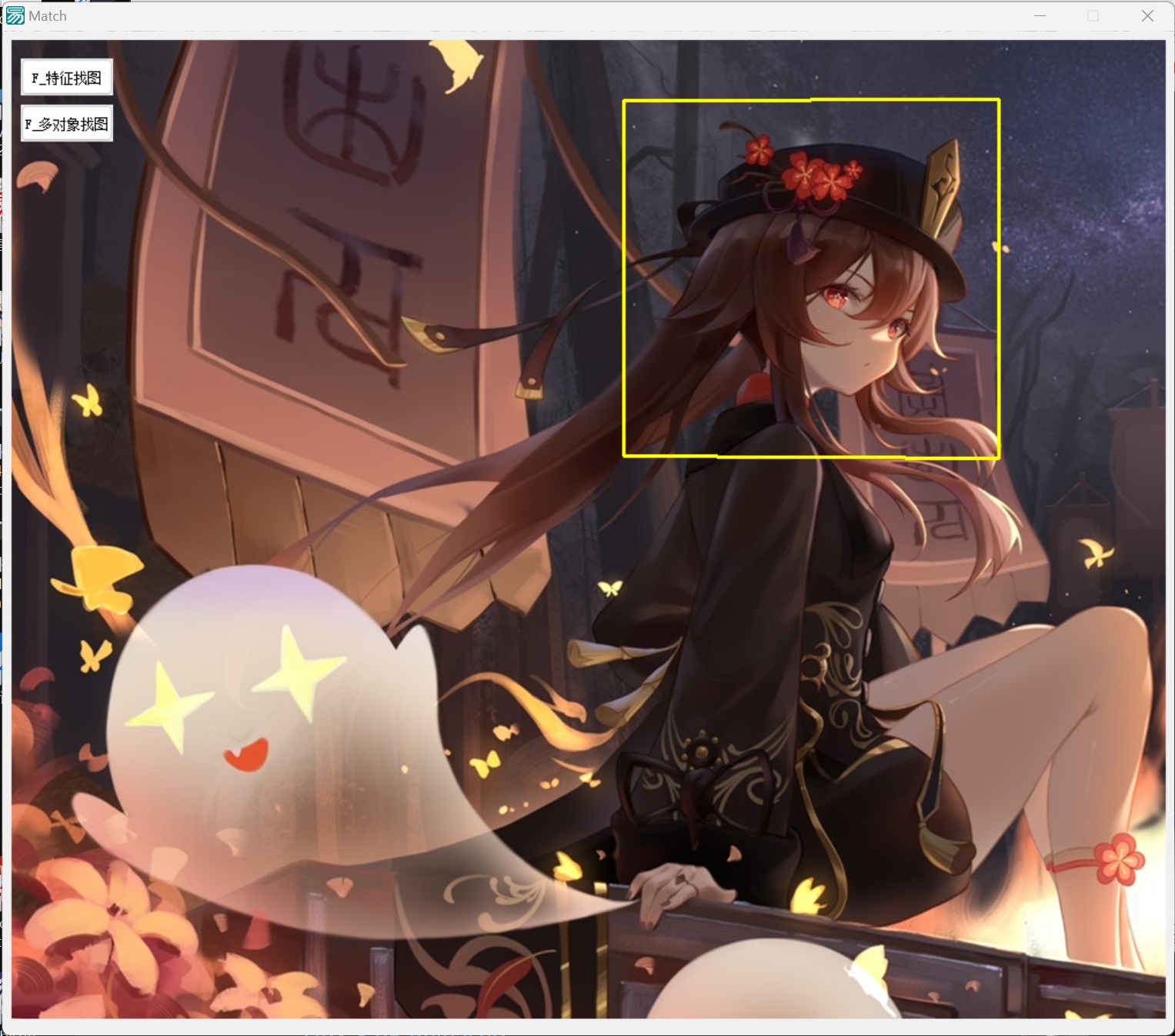

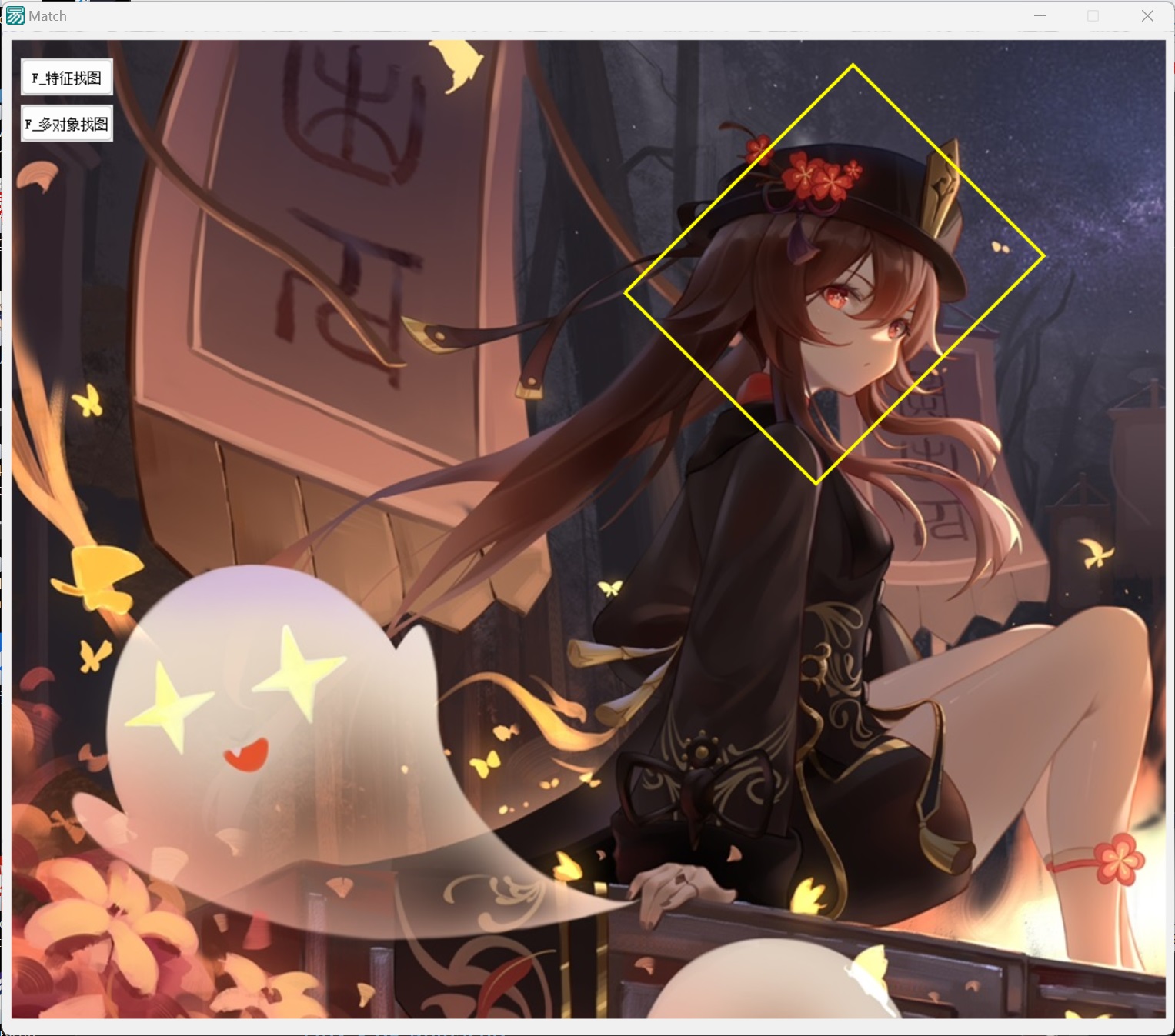 可以发现实现的效果非常好。
可以发现实现的效果非常好。| 欢迎光临 ToB企服应用市场:ToB评测及商务社交产业平台 (https://dis.qidao123.com/) | Powered by Discuz! X3.4 |