ToB企服应用市场:ToB评测及商务社交产业平台
标题:
【飞控制作】从飞控制作学习项目经验
[打印本页]
作者:
王柳
时间:
2024-5-16 01:34
标题:
【飞控制作】从飞控制作学习项目经验
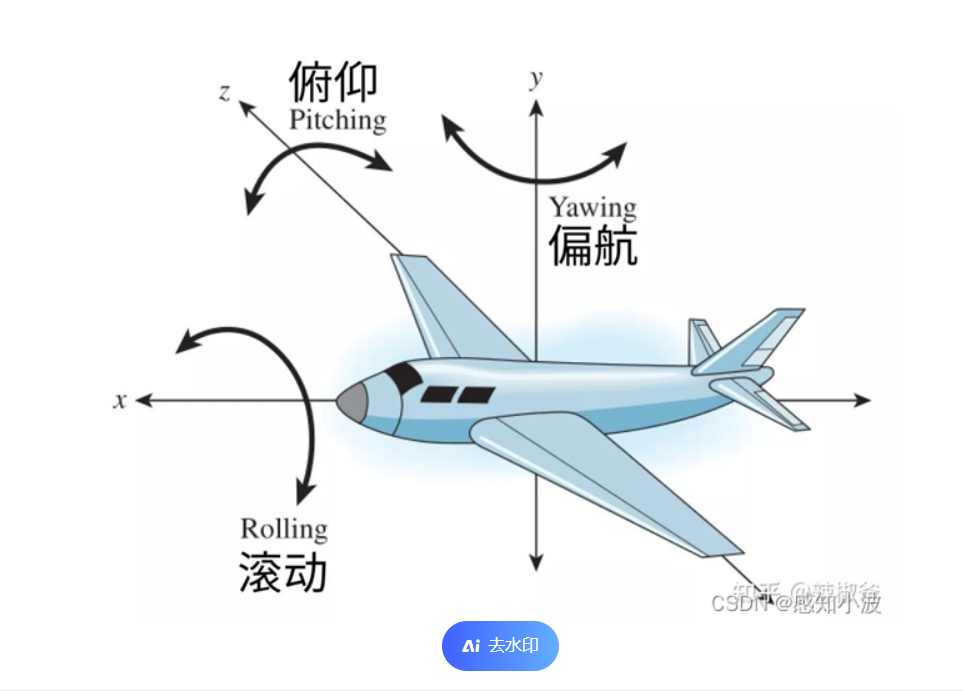
1. 四旋翼无人机飞行原理:欠驱动系统
通过4个电机的转速,来控制飞行器X、Y、Z轴的加速度和角速度,实现悬停、垂直升降、俯仰、偏航、滚转(这里只对比较陌生的俯仰、偏偏行、滚转做示意图阐明)。
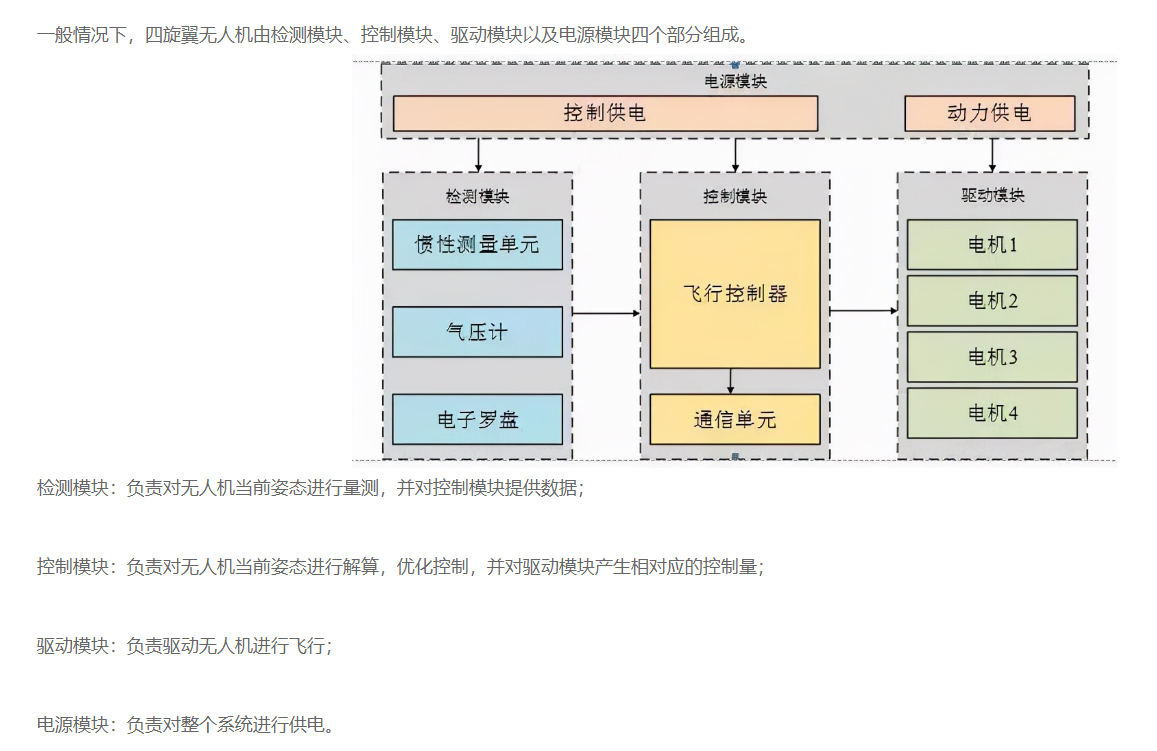
组成
运动控制
运动控制主要参考:
四旋翼无人机飞行原理及控制方法,你相识多少?
实物图
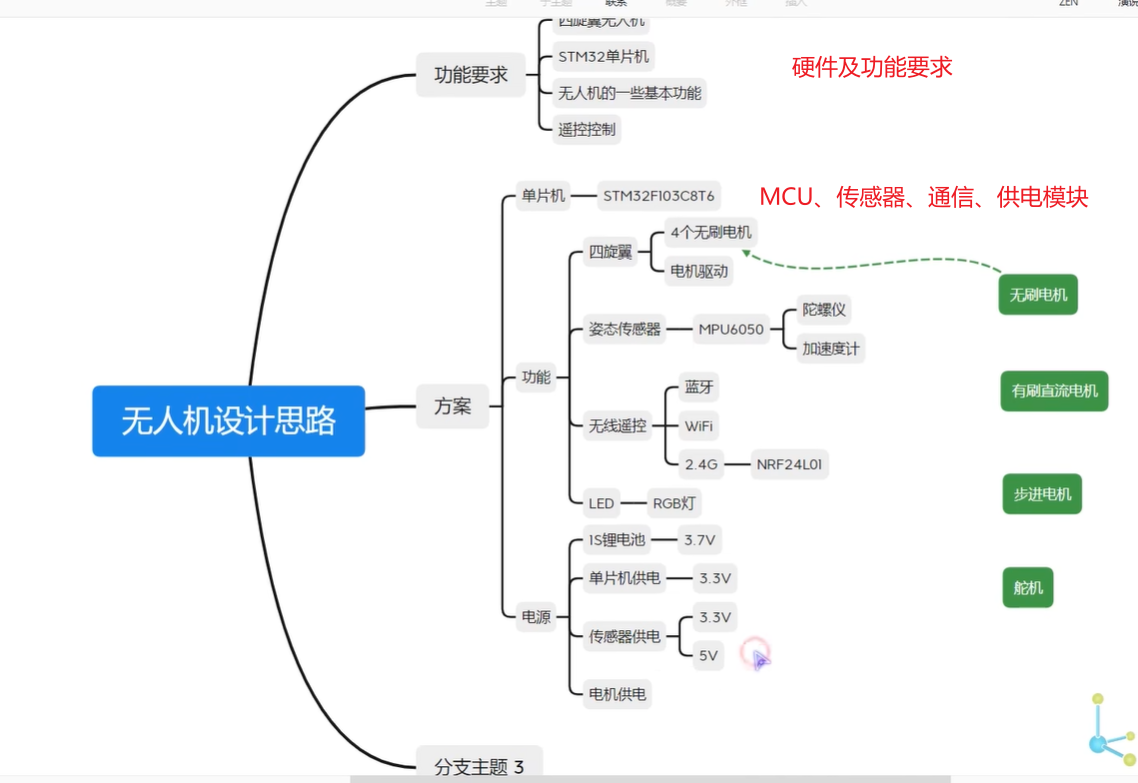
2. 无人机计划思路
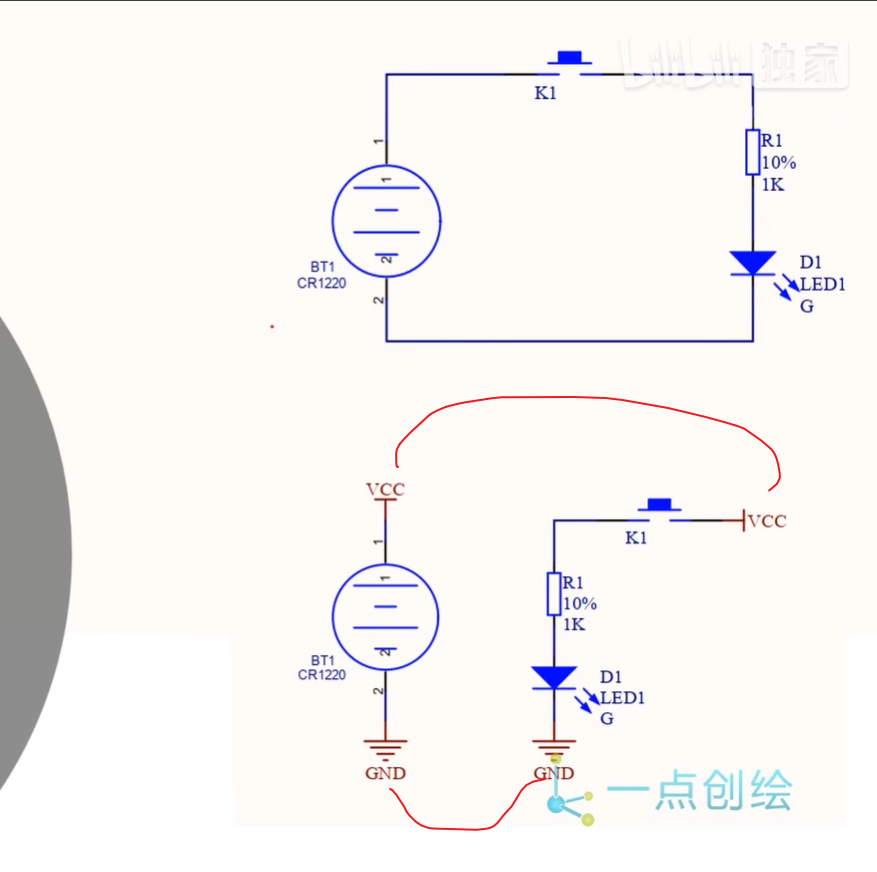
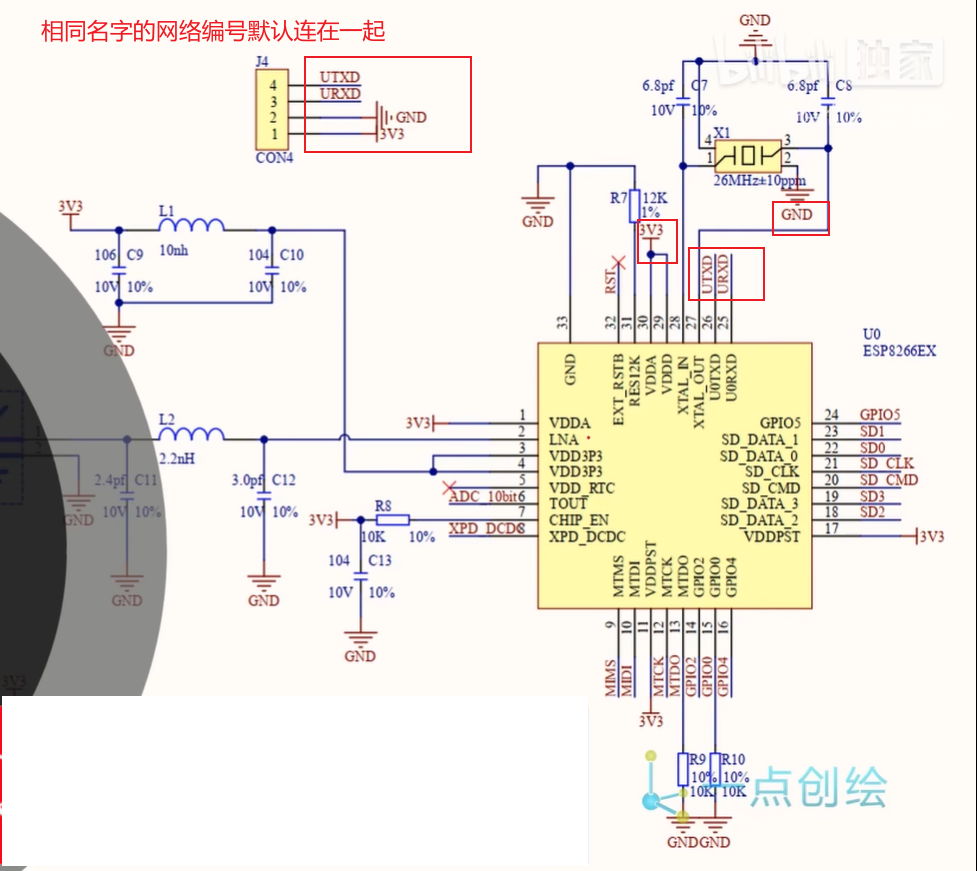
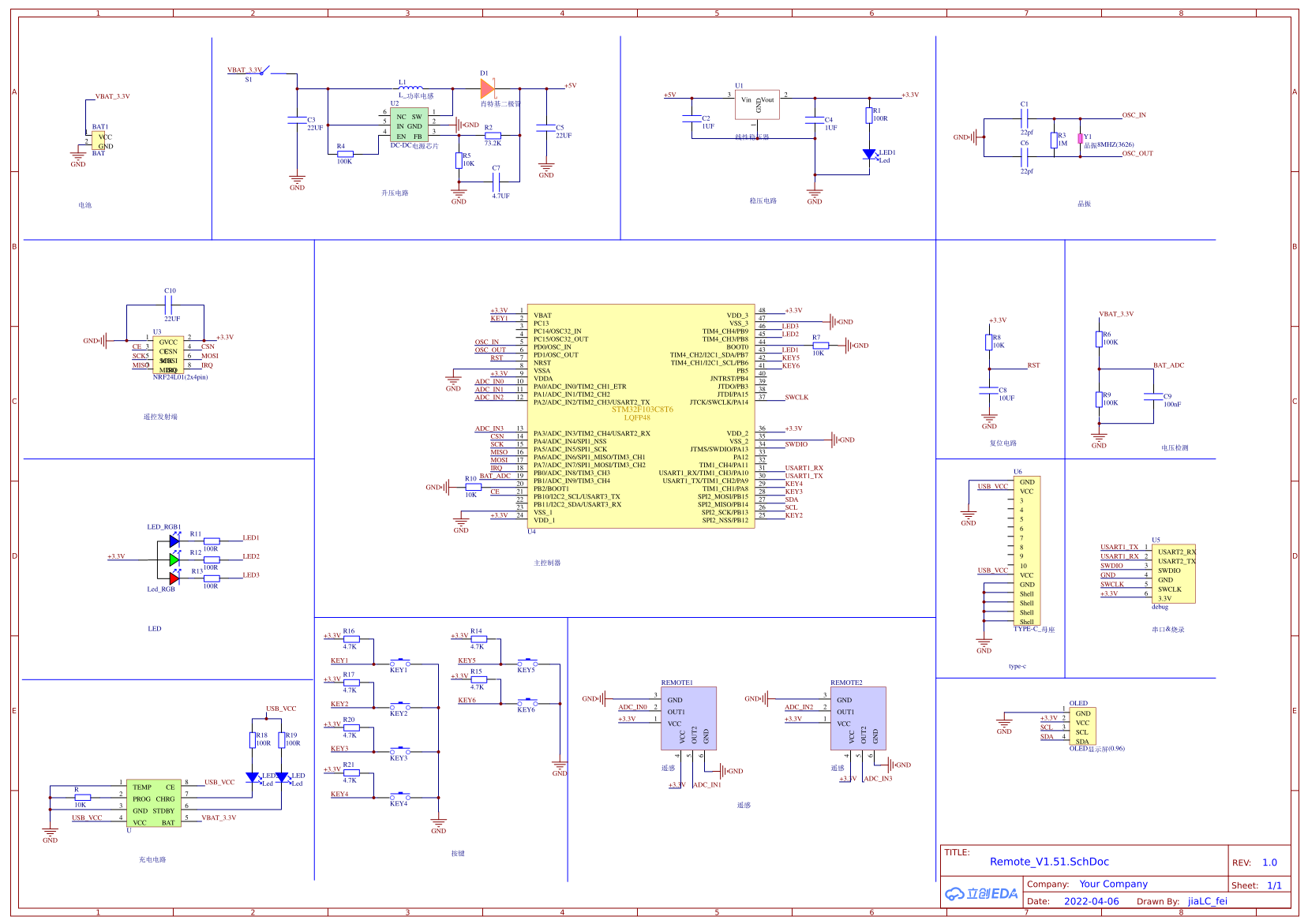
3. 原理图和电路
留意,电路图为上图,而实际计划电路时电路结构复杂,因此通常会用网络编号来来代表差别电路间的连接关系。雷同网络编号的端子默认连在一起。
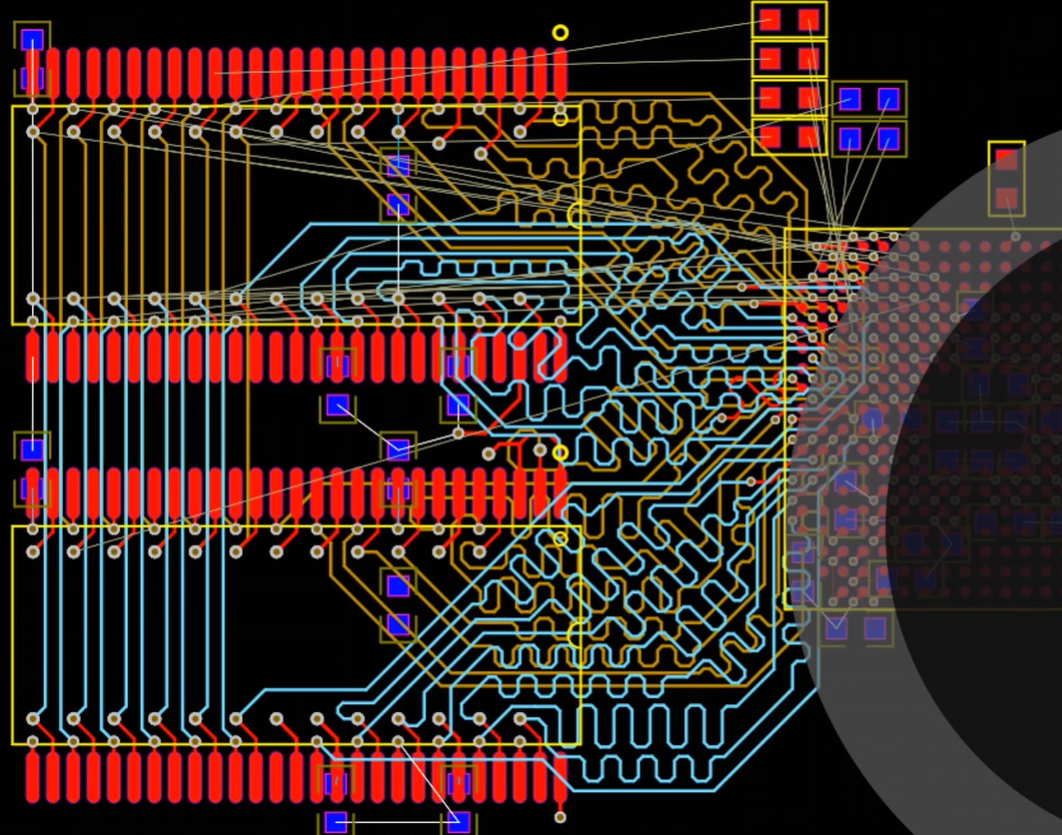
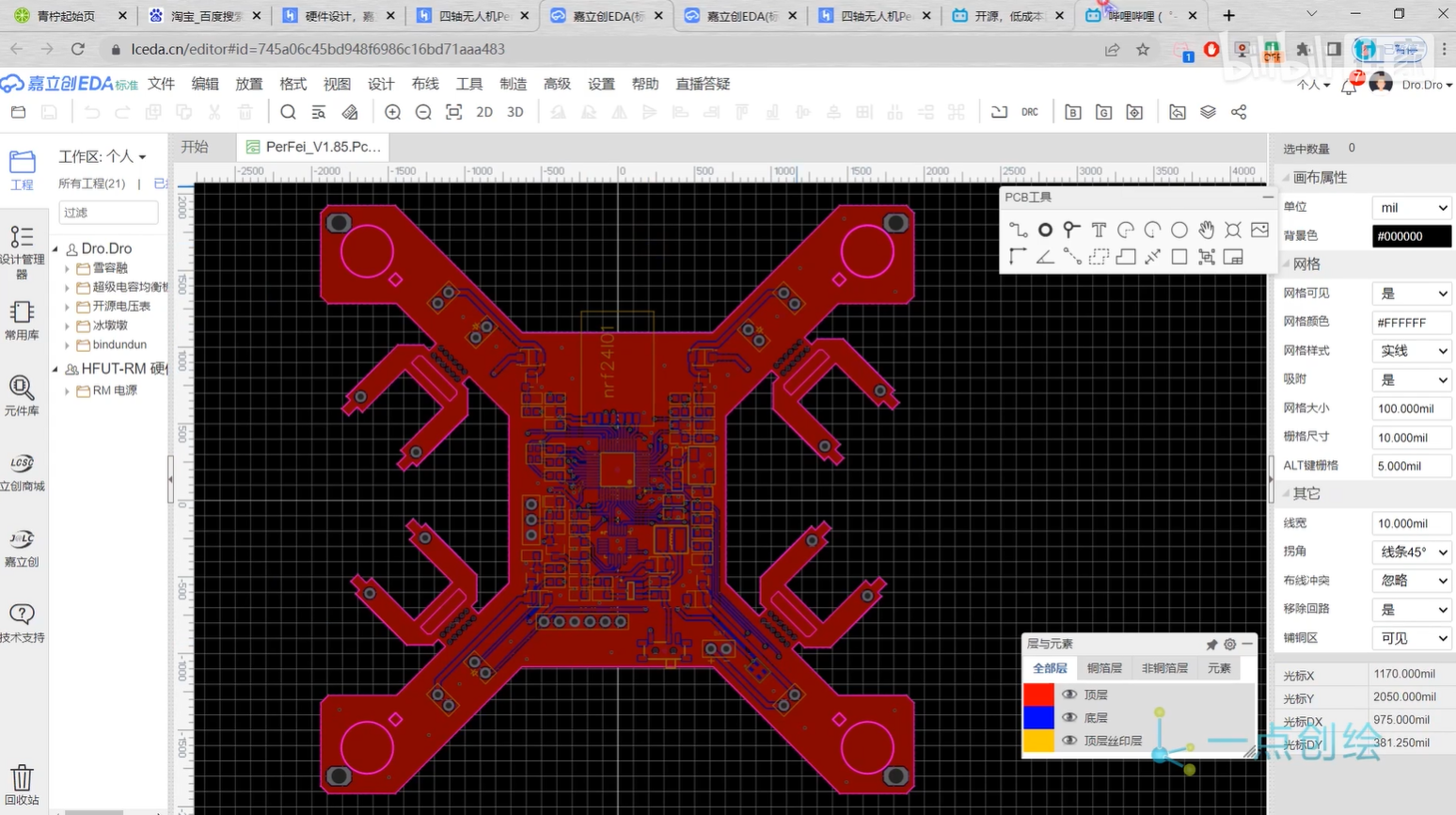
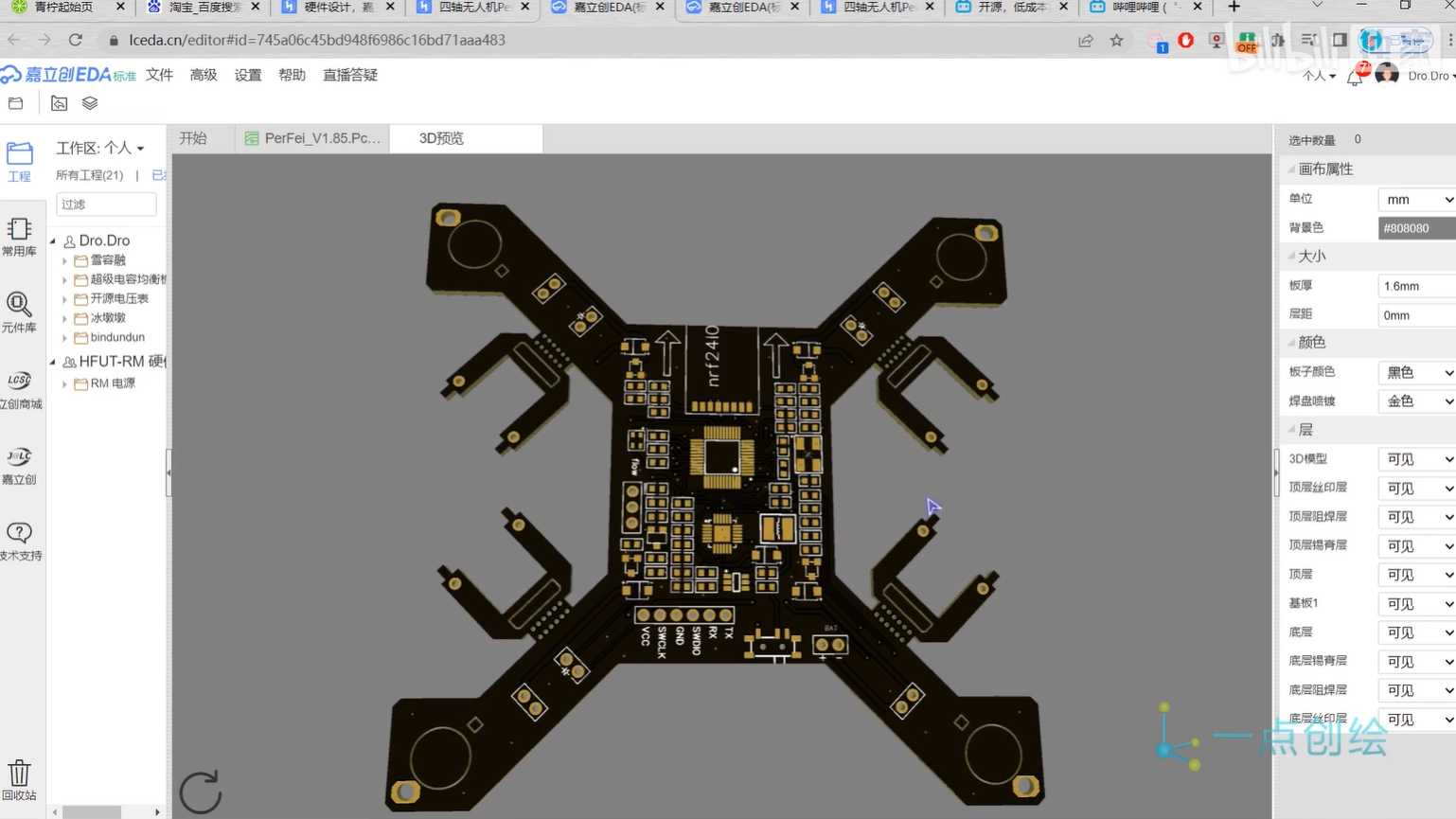
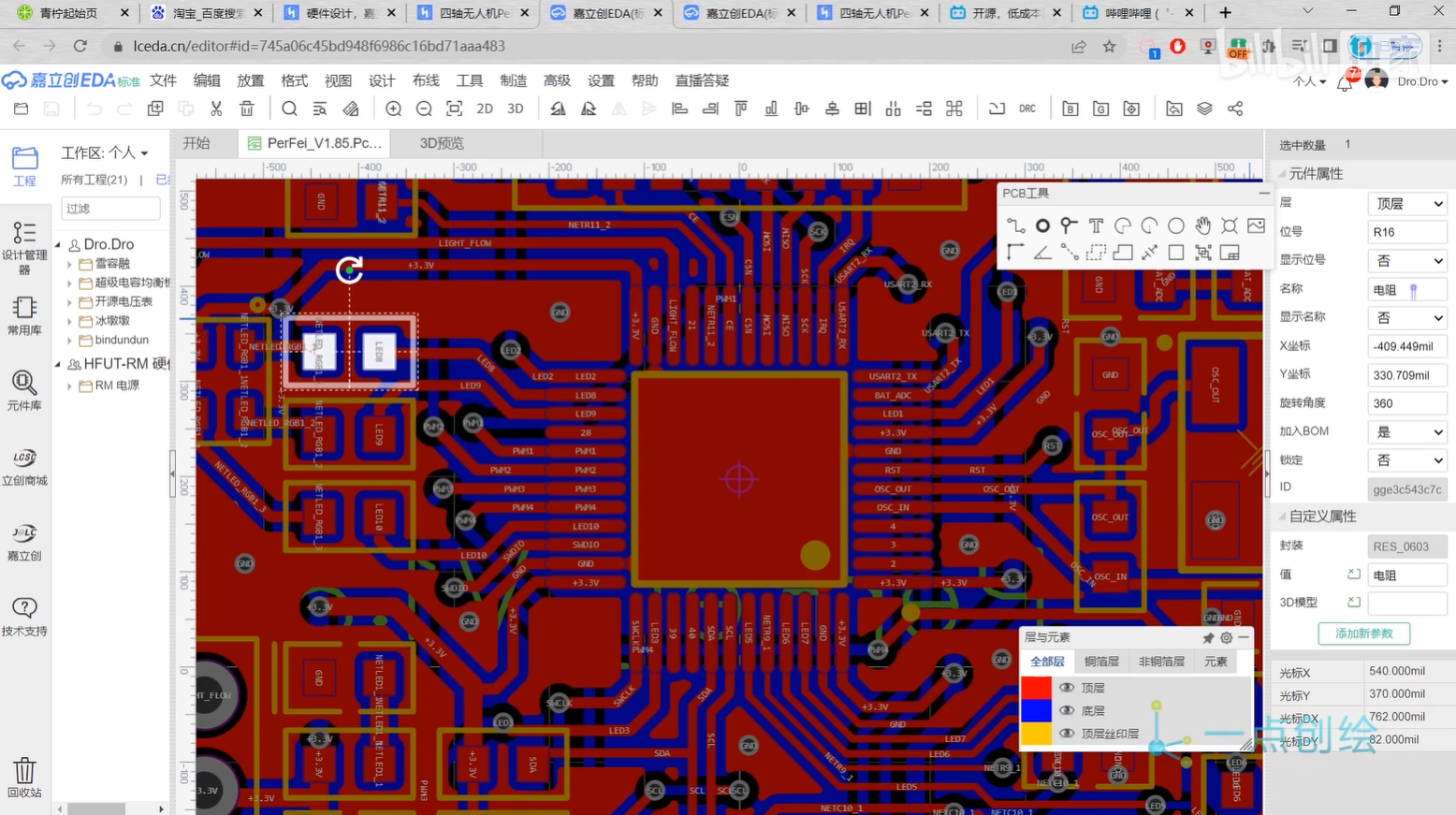
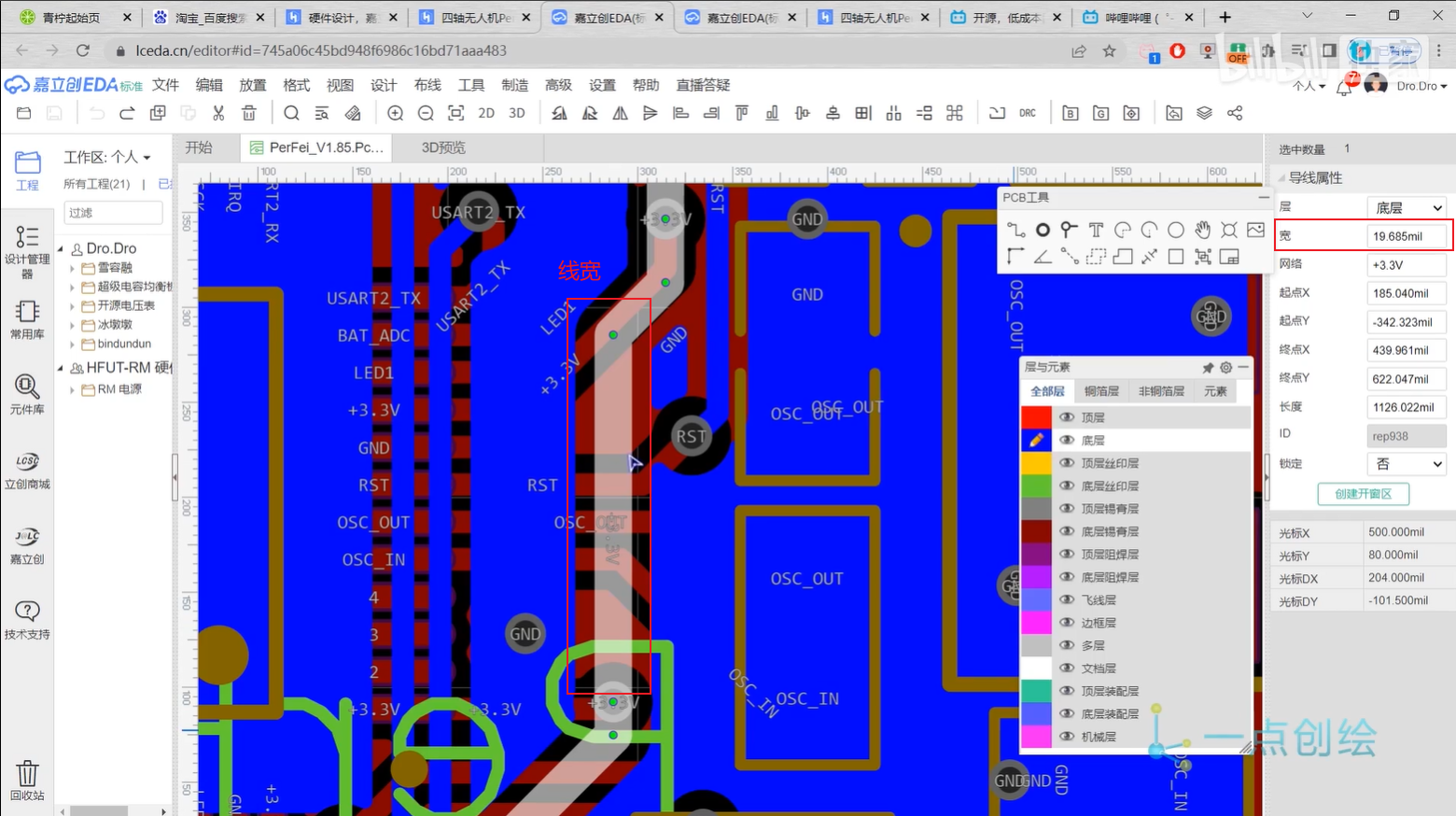
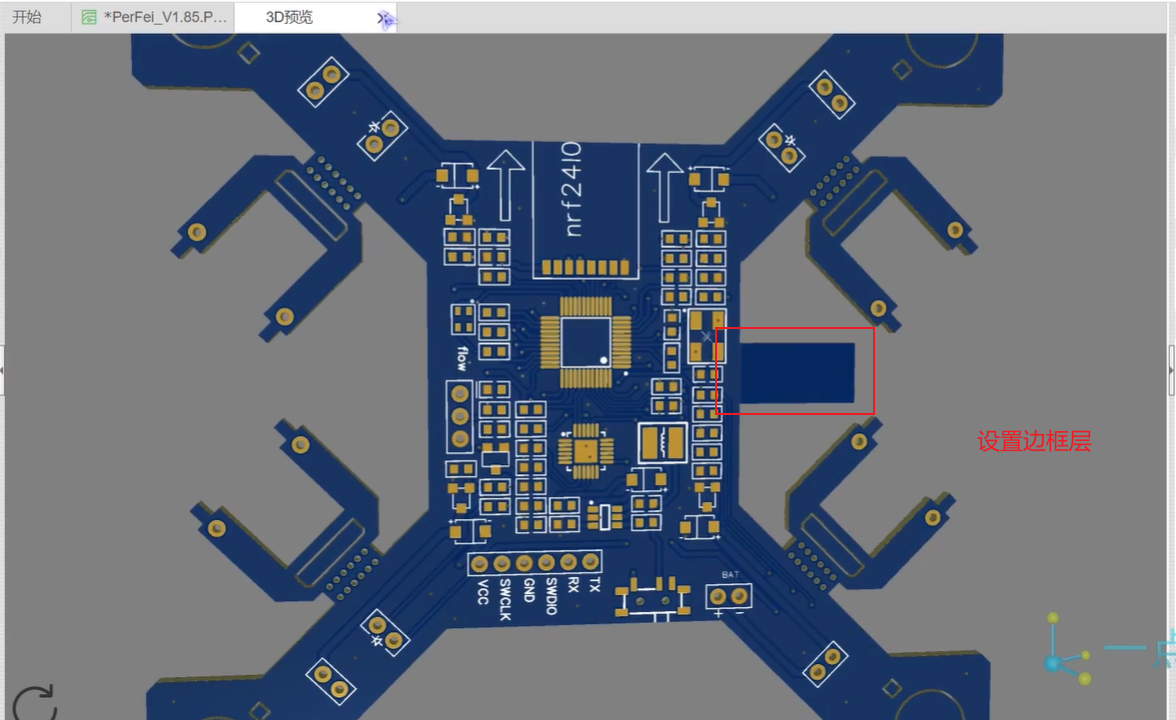
4. PCB计划
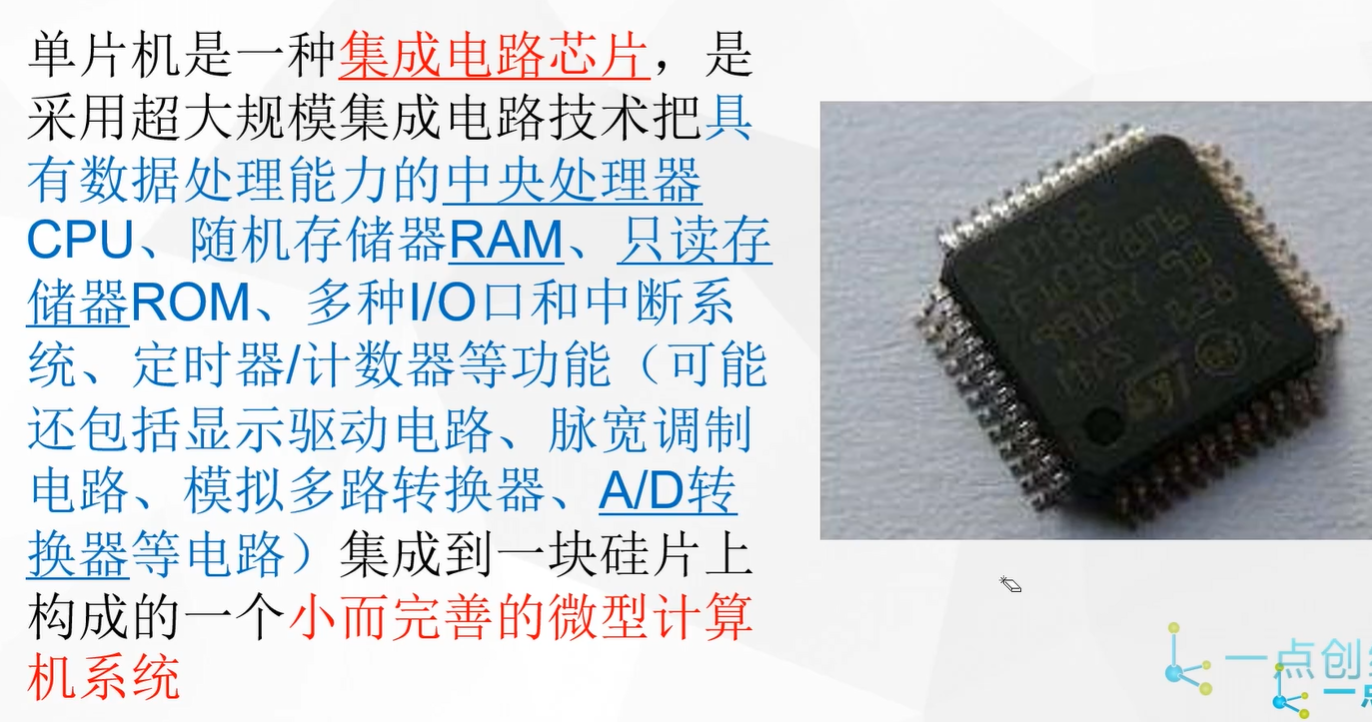
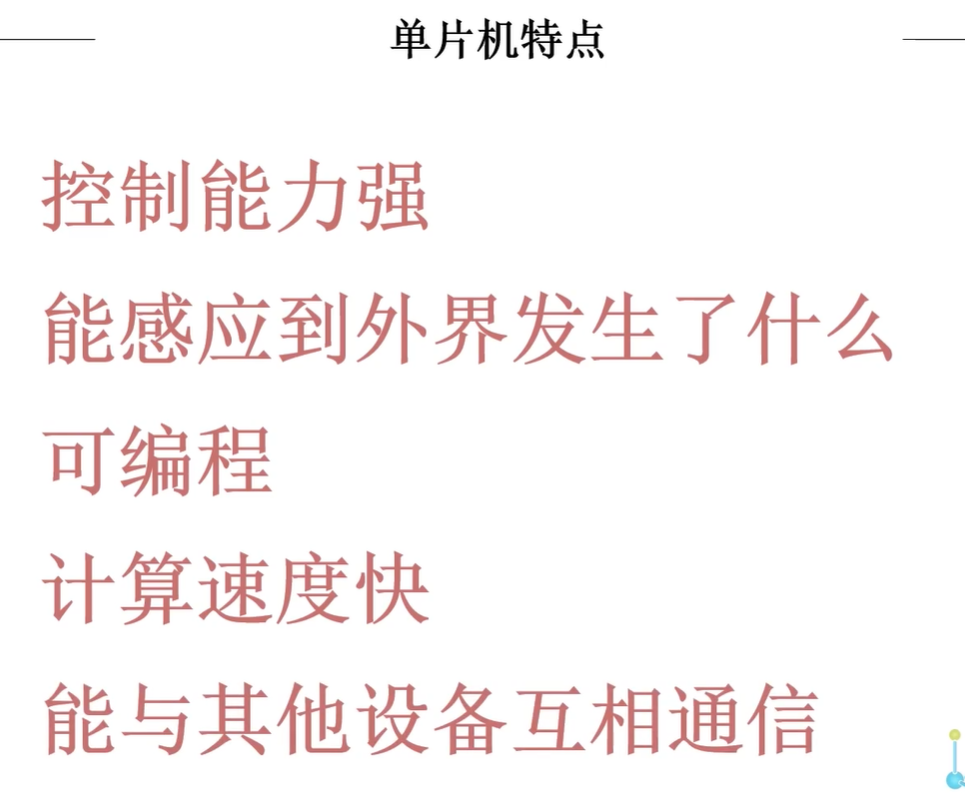
5. 单片机(软件部分)
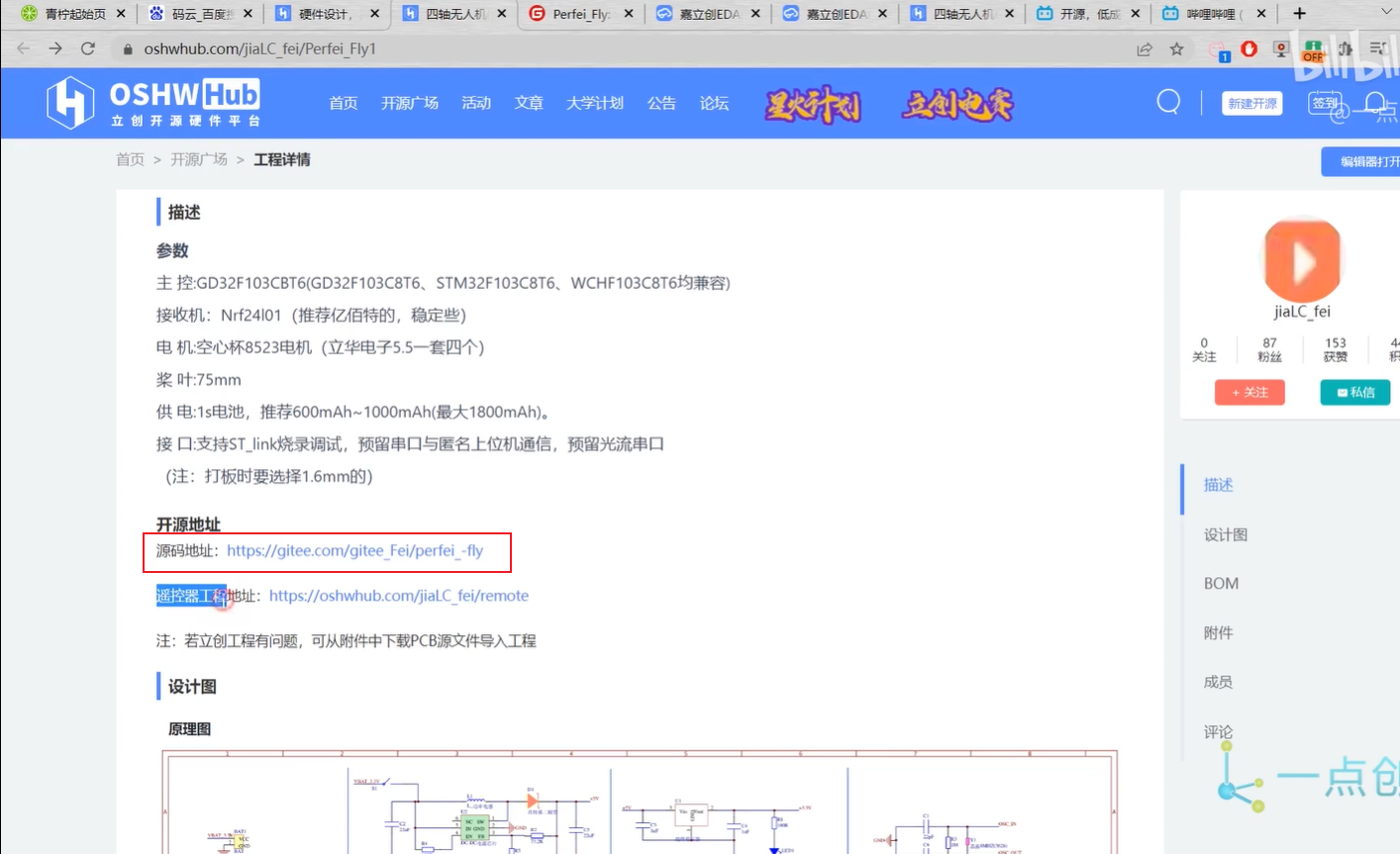
6. 获取免费开源项目
立创开源硬件平台
7. PCB计划
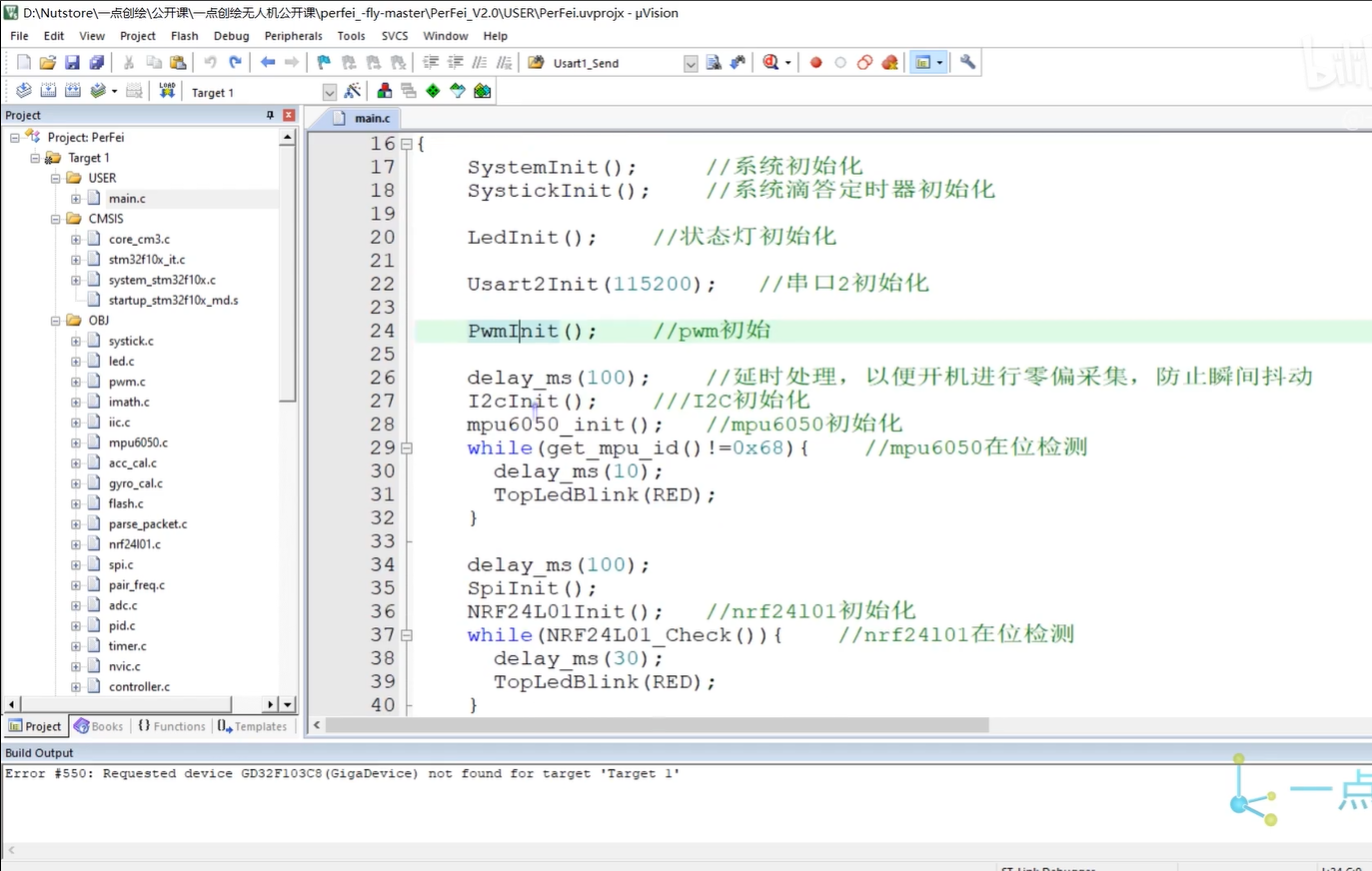
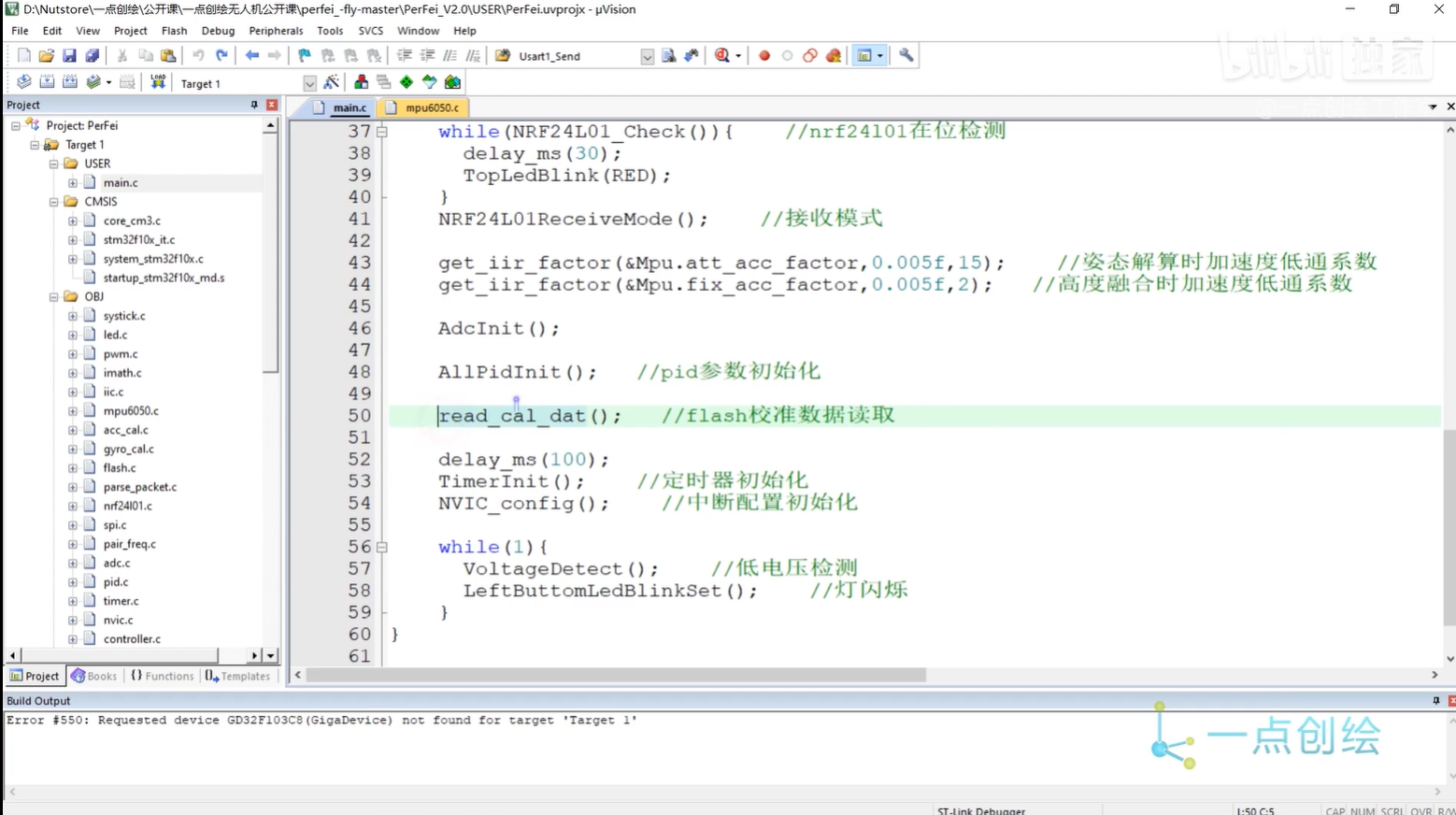
8. 代码部分
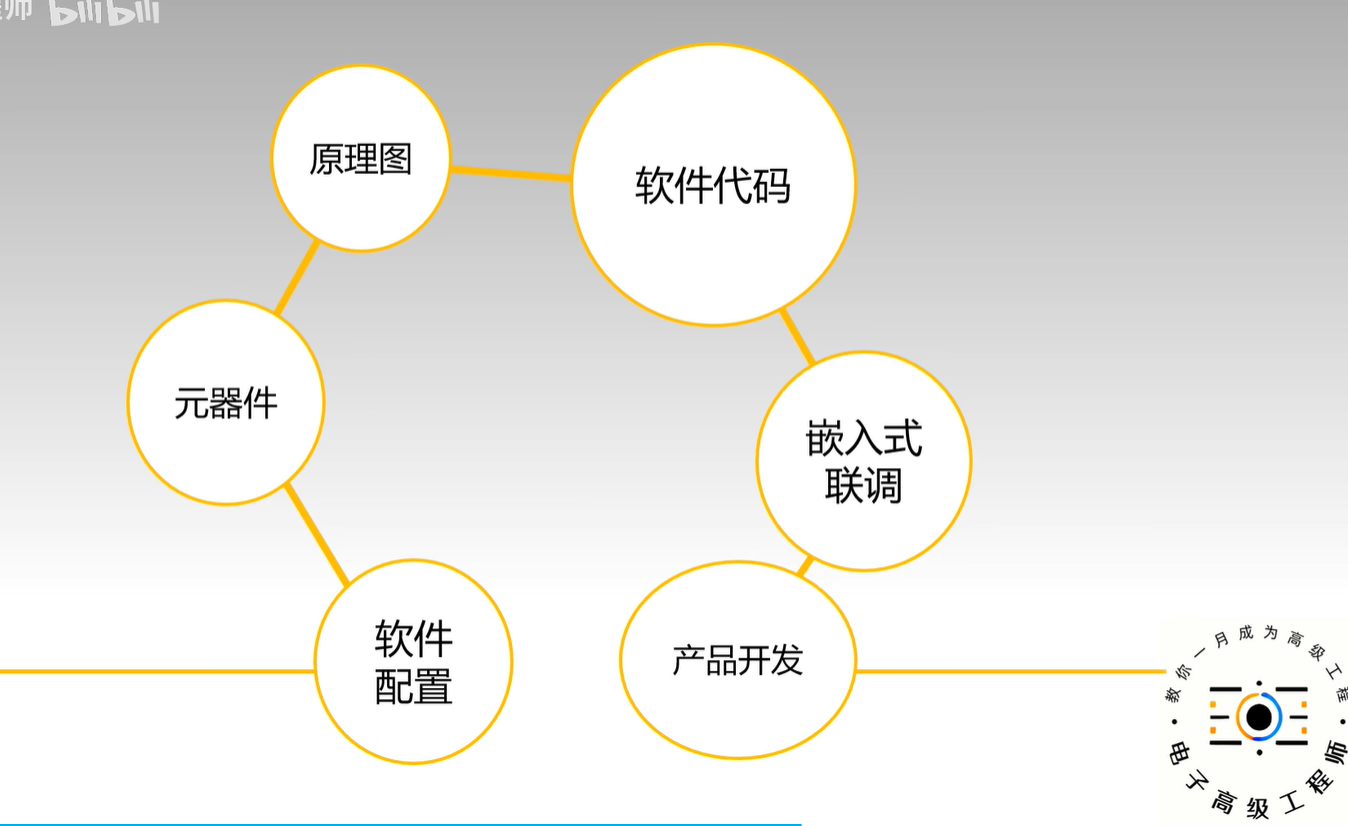
9. 开发流程图
参考:
四旋翼无人机飞行原理及控制方法,你相识多少?
【自制飞控】从零开始造四旋翼无人机新手教程——快速实现无人机硬件及STM32编程
1-教你一个月成为高级电子工程师
免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作!更多信息从访问主页:qidao123.com:ToB企服之家,中国第一个企服评测及商务社交产业平台。
欢迎光临 ToB企服应用市场:ToB评测及商务社交产业平台 (https://dis.qidao123.com/)
Powered by Discuz! X3.4