ToB企服应用市场:ToB评测及商务社交产业平台
标题:
【3DGS】Ubuntu20.04体系搭建3D Gaussian Splatting及可视化环境
[打印本页]
作者:
络腮胡菲菲
时间:
2024-6-8 09:32
标题:
【3DGS】Ubuntu20.04体系搭建3D Gaussian Splatting及可视化环境
目录
安装CUDA
下载Gaussian Splatting的源码
创建Gaussian Splatting假造环境
下载数据集并练习
模型可视化
更新gcc和g++
更新cmake
安装eigen3.4.0
安装opencv4.9.0
安装远程可视化
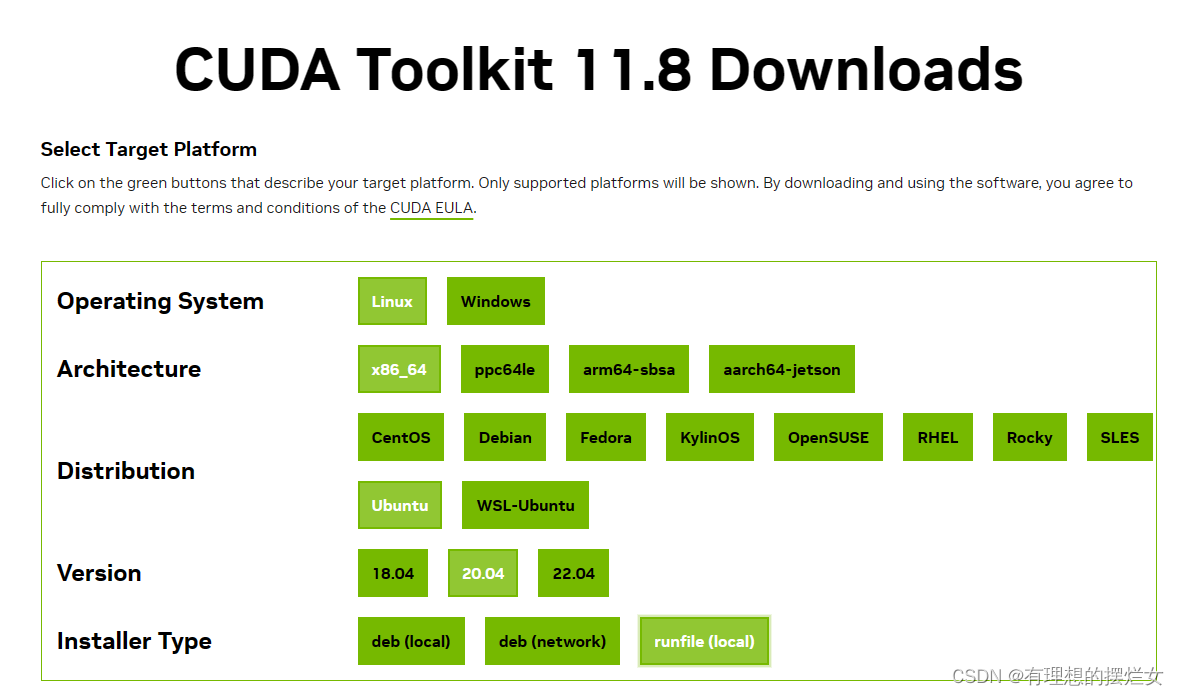
安装CUDA
官方说we used 11.8, known issues with 11.6。因此需要
确保CUDA版本高于11.8
。
CUDA官网链接:https://developer.nvidia.com/cuda-toolkit-archive
wget https://developer.download.nvidia.com/compute/cuda/11.8.0/local_installers/cuda_11.8.0_520.61.05_linux.run
sudo sh cuda_11.8.0_520.61.05_linux.run
复制代码
安装完成后,配置并更新环境变量:
vim ~/.profile
#添加路径(此处展示的是默认路径,根据自己的路径来)
export PATH=/usr/local/cuda-11.8/bin${PATH:+:${PATH}}
export LD_LIBRARY_PATH=/usr/local/cuda-11.8/lib64${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
source ~/.profile
复制代码
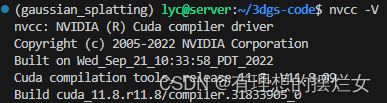
使用下面的下令查看你的CUDA版本:
nvcc -V
复制代码
下载Gaussian Splatting的源码
留意:末了的--recursive特殊重要,不加的话submodules和sibr_viewers中部分东西装不上,影响后续环境配置。
git clone https://github.com/graphdeco-inria/gaussian-splatting --recursive
复制代码
创建Gaussian Splatting假造环境
使用下面的下令实行,会自动为你创建一个名为 gaussian_splatting 的假造环境。并在安装完所需要的依赖库后激活。
conda env create --file environment.yml
conda activate gaussian_splatting
复制代码
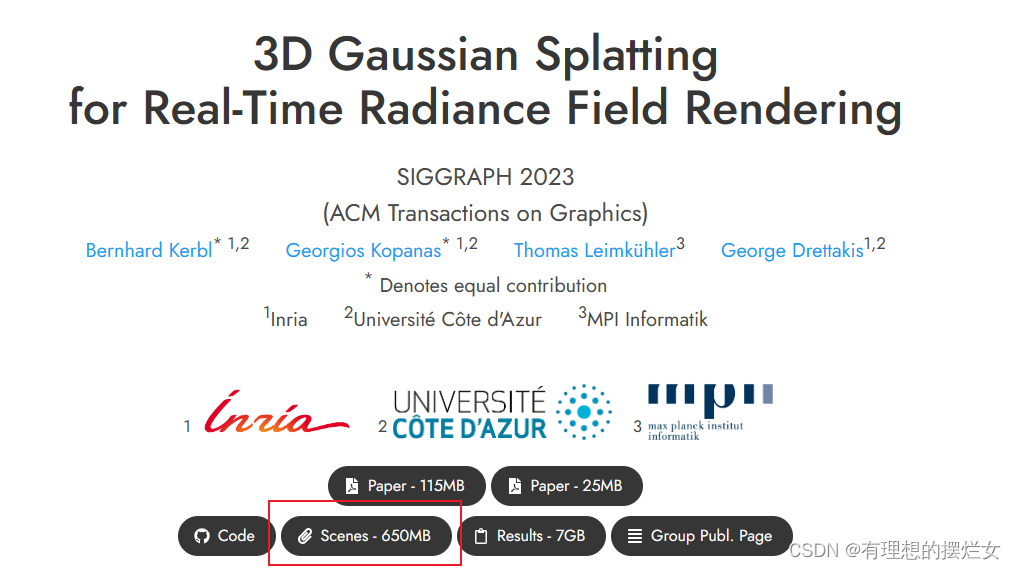
下载数据集并练习
数据集:3D Gaussian Splatting for Real-Time Radiance Field Rendering (inria.fr)。
scenes数据集包含了4个场景的图片,并已经通过convert.py举行colmap转换,可以直接用来做train.py。
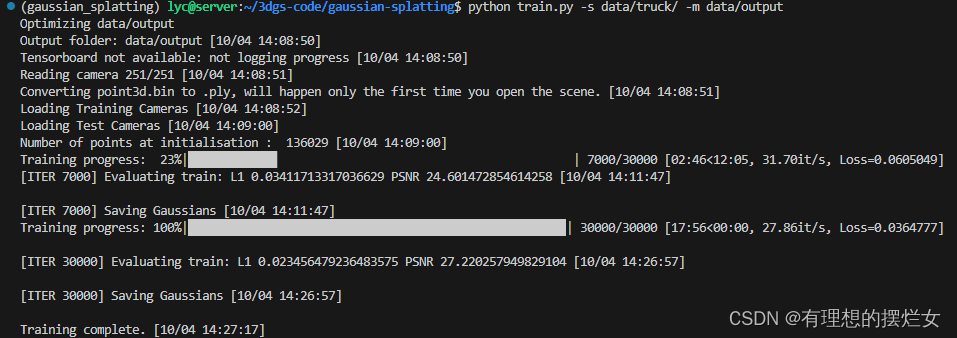
我新建了一个data文件夹用来放数据和输出结果,然后可以开始练习了(-s后接数据路径-m后接输出路径):
python train.py -s data/truck/ -m data/truck/output
复制代码
练习速度真的很快!其中L1是L1损失;PSNR是图像峰值信噪比,单元是dB,数值越大代表MSE越小,MSE越小代表两张图片越接近,失真就越小,因此PSNR值数值越大表现失真越小。
生成的output文件夹布局如下(程序会保存练习7000轮与30000轮时的模型):
模型可视化
更新gcc和g++
cd /usr/bin
sudo rm gcc
sudo ln -s gcc-9 gcc
sudo rm g++
sudo ln -s g++-9 g++
复制代码
更新cmake
cmake官方列表:Index of /files (cmake.org)
(官方文件说recent version, we used 3.24)
#下载
wget https://cmake.org/files/v3.25/cmake-3.25.0-linux-x86_64.tar.gz
#解压
tar -zxvf cmake-3.25.0-linux-x86_64.tar.gz
复制代码
cmake-3.25.0-Linux-x86_64.tar.gz压缩包里的文件是已经编译过的,解压就可以用!
#将解压出来的包移到 /opt 目录下
sudo mv cmake-3.25.0-linux-x86_64 /opt/cmake-3.25.0
#建立软连接
sudo ln -sf /opt/cmake-3.25.0/bin/* /usr/bin/
复制代码
查看版本
安装eigen3.4.0
不知道为什么我不绝进不去eigen官网https://eigen.tuxfamily.org/index.php?title=Main_Page
背面找到了这个下载链接:发布 · libeigen / eigen · GitLab
(写在前面:555安装这个是因为make opencv的时候提示egien版本不敷新,所以就用源码安装了一下。但是呢后续安装colmap的时候又提示eigen版本过高咋咋的,所以我又把它卸载了。大家可以根据自己的情况试试,我也是非常的迷惑。)
#下载
wget https://gitlab.com/libeigen/eigen/-/archive/3.4.0/eigen-3.4.0.zip
#解压
unzip eigen-3.4.0
#进入文件夹
cd eigen-3.4.0
#创建build文件夹并进入
mkdir build
cd build
#cmake构建
cmake..
make
#安装
sudo make install
#复制文件夹(方便以后查找)
sudo cp -r /usr/local/include/eigen3 /usr/include
#查看当前版本
pkg-config --modversion eigen3
复制代码
安装opencv4.9.0
官网:Releases - OpenCV
github地点:https://github.com/opencv
#下载opencv
git clone https://github.com/opencv/opencv.git
#进入源码文件夹
cd opencv
#下载opencv_contrib
git clone https://github.com/opencv/opencv_contrib.git
复制代码
安装依赖
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install cmake gfortran
sudo apt-get install python3 python3-dev python3-numpy
sudo apt-get install libjpeg-dev libtiff-dev libgif-dev
sudo apt-get install libgstreamer1.0-dev gstreamer1.0-gtk3
sudo apt-get install libgstreamer-plugins-base1.0-dev gstreamer1.0-gl
sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install libgtk2.0-dev libcanberra-gtk*
sudo apt-get install libxvidcore-dev libx264-dev libgtk-3-dev
sudo apt-get install libtbb2 libtbb-dev libdc1394-22-dev libv4l-dev
sudo apt-get install libopenblas-dev libatlas-base-dev libblas-dev
sudo apt-get install protobuf-compiler
复制代码
编译安装
#在opencv文件夹下
mkdir build
cd build
cmake -D WITH_TBB=ON -D WITH_EIGEN=ON -D OPENCV_GENERATE_PKGCONFIG=ON -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D OPENCV_EXTRA_MODULES_PATH=../opencv_contrib/modules -D OPENCV_ENABLE_NONFREE=ON ..
sudo make -j8
sudo make install
复制代码
环境配置
#修改文件
sudo vim /etc/ld.so.conf
#在文件中输入,并保存退出
/usr/local/lib
#执行命令
sudo ldconfig
复制代码
#修改文件
sudo vim /etc/bash.bashrc
#在文件中输入,并保存退出
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
#执行命令
source /etc/bash.bashrc
复制代码
查看版本号:pkg-config --modversion opencv4
安装远程可视化
#安装依赖
sudo apt install -y libglew-dev libassimp-dev libboost-all-dev libgtk-3-dev libopencv-dev libglfw3-dev libavdevice-dev libavcodec-dev libeigen3-dev libxxf86vm-dev libembree-dev
#进入文件夹
cd SIBR_viewers
#因为我是20.04版本,所以还要加一句
#22.04版本不需要加
git checkout fossa_compatibility
#构建安装
cmake -Bbuild . -DCMAKE_BUILD_TYPE=Release
cmake --build build -j24 --target install
复制代码
在这个过程中出现了非常多的标题hai
大多数都是版本不划一造成的(所以大家可能不会遇到)
我的办理办法就是遇到一个办理一个 耗时很久
终于在众多编译的警告下安装成功(看的真是心脏怦怦跳)
在SIBR_viewers/install/bin文件夹内如下:
接下来就是见证古迹的时刻(我用的MobaXterm):
./SIBR_gaussianViewer_app -m /home/lyc/3dgs-code/gaussian-splatting/data/truck/output
复制代码
免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作!更多信息从访问主页:qidao123.com:ToB企服之家,中国第一个企服评测及商务社交产业平台。
欢迎光临 ToB企服应用市场:ToB评测及商务社交产业平台 (https://dis.qidao123.com/)
Powered by Discuz! X3.4