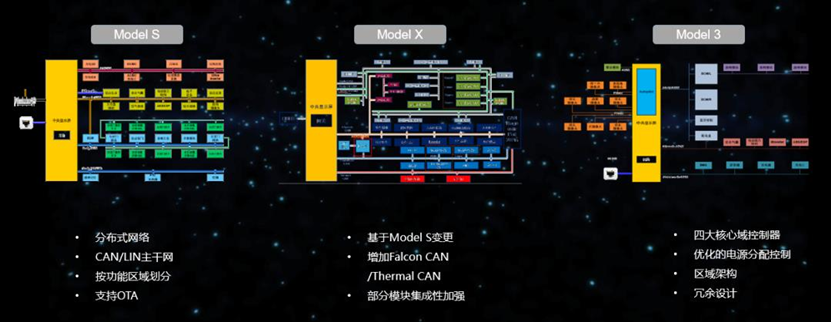
通过三款车型的演进,特斯拉的新型电子电气架构不光实现了 ECU数目标大幅减少、线束大幅收缩( MODEL S 线束 3000米, Model 3 减少一半以上),更冲破了汽车财产旧有的零部件供应体系(即软硬件深度耦合打包出售给主机厂,主机厂议价能力差,后续功能调解困难),真正实现了软件界说汽车, 特斯拉的 OTA 可以改变制动距离、开通座椅加热,提供个性化的用户体验, 由于突破了功能域,特斯拉的域控制器横跨车身、 座舱、底盘及动力域,这使得车辆的功能迭代更为机动, 用户可以体验到车是常用常新的,与之形成光显对比的是,大部分传统车厂的 OTA 仅限于车载信息娱乐等功能。