IT评测·应用市场-qidao123.com
标题:
ROS学习记录:栅格舆图格式
[打印本页]
作者:
民工心事
时间:
2024-6-13 21:37
标题:
ROS学习记录:栅格舆图格式
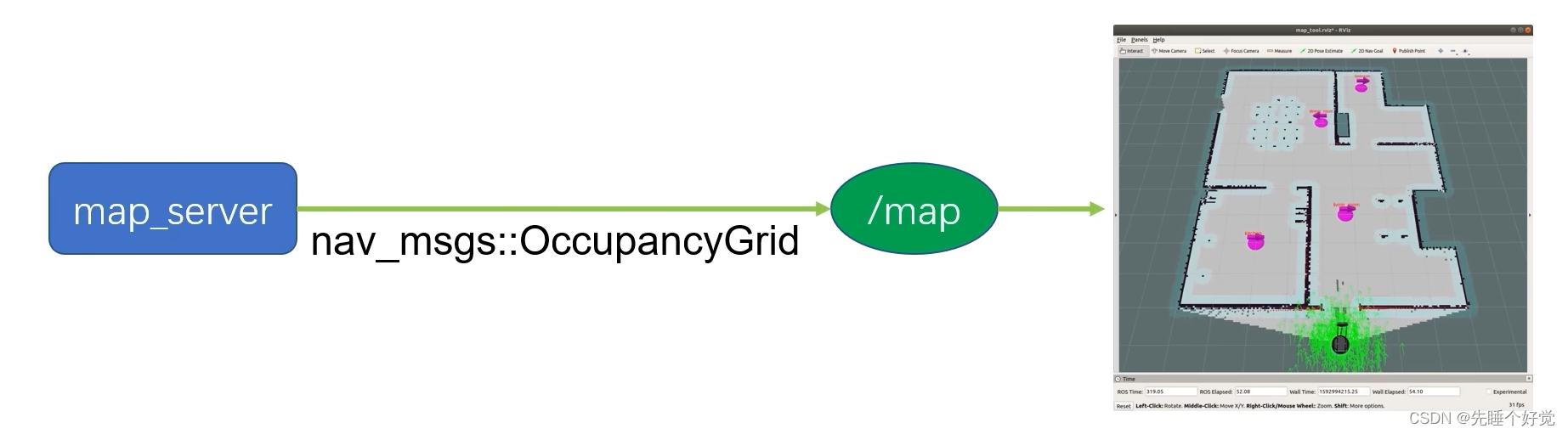
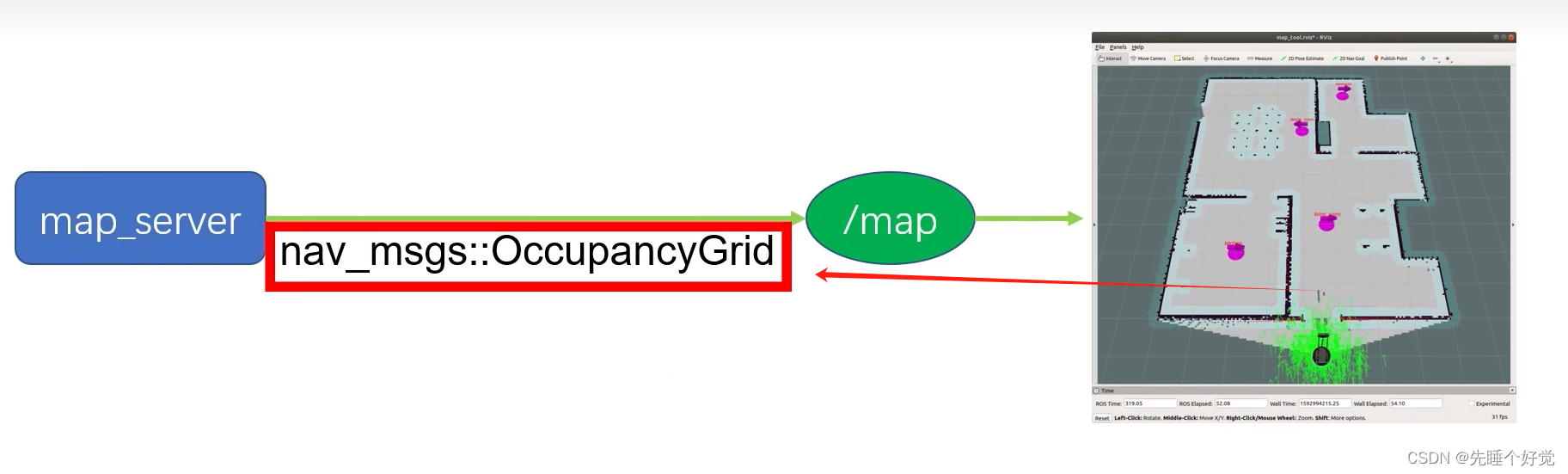
一、机器人导航所使用的舆图数据,就是ROS导航软件包里的map_server节点在话题 /map 中发布的消息数据,消息范例是nav_msgs消息包中的OccupancyGrid,它的中文意思的占据栅格,是一种正方形小格子构成的舆图。
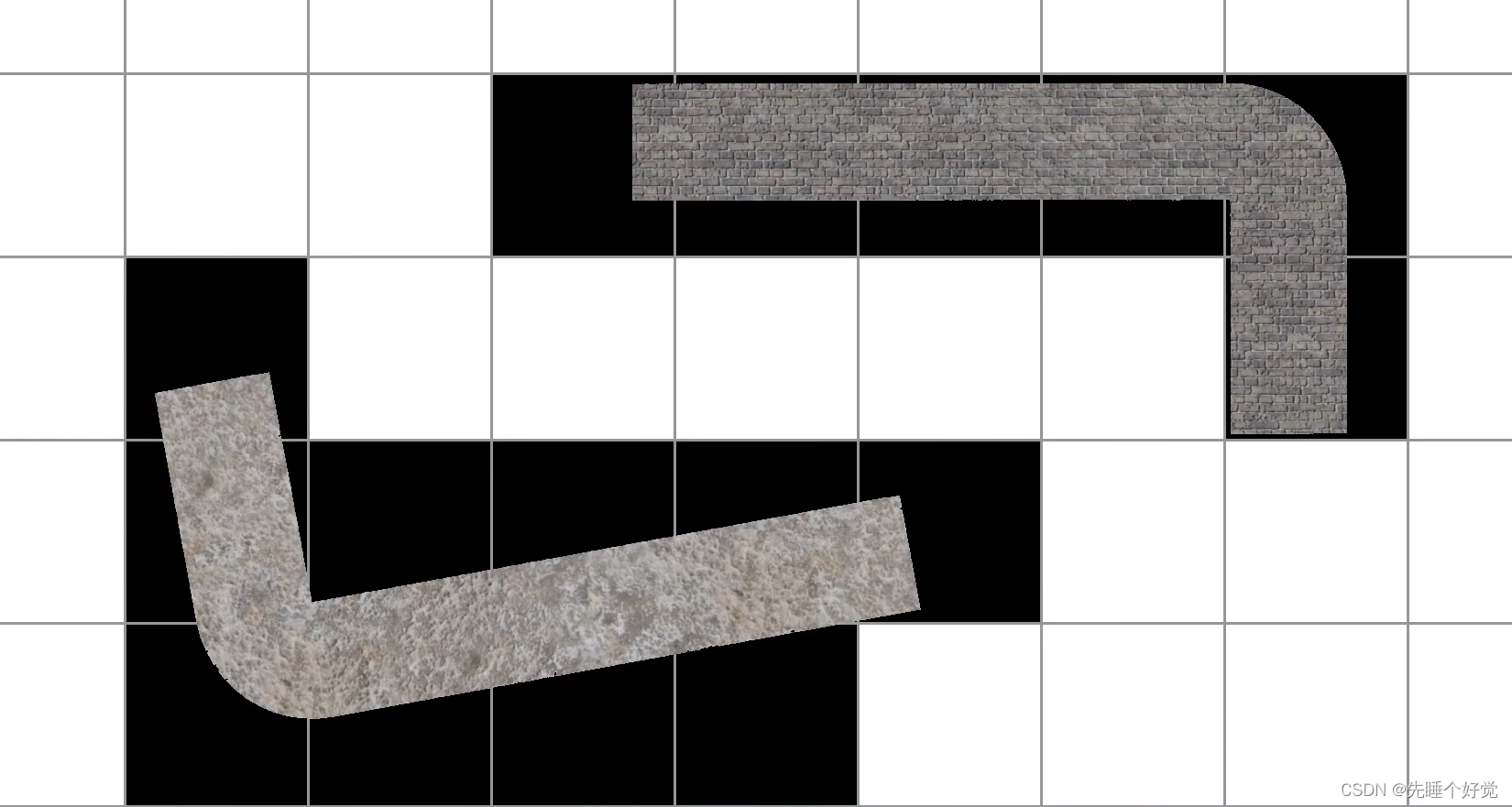
二、对障碍物进行俯视,在地面上画出巨细一样的正方形栅格,没被障碍物占据的栅格涂上白色,被障碍物占据到的栅格涂上玄色。
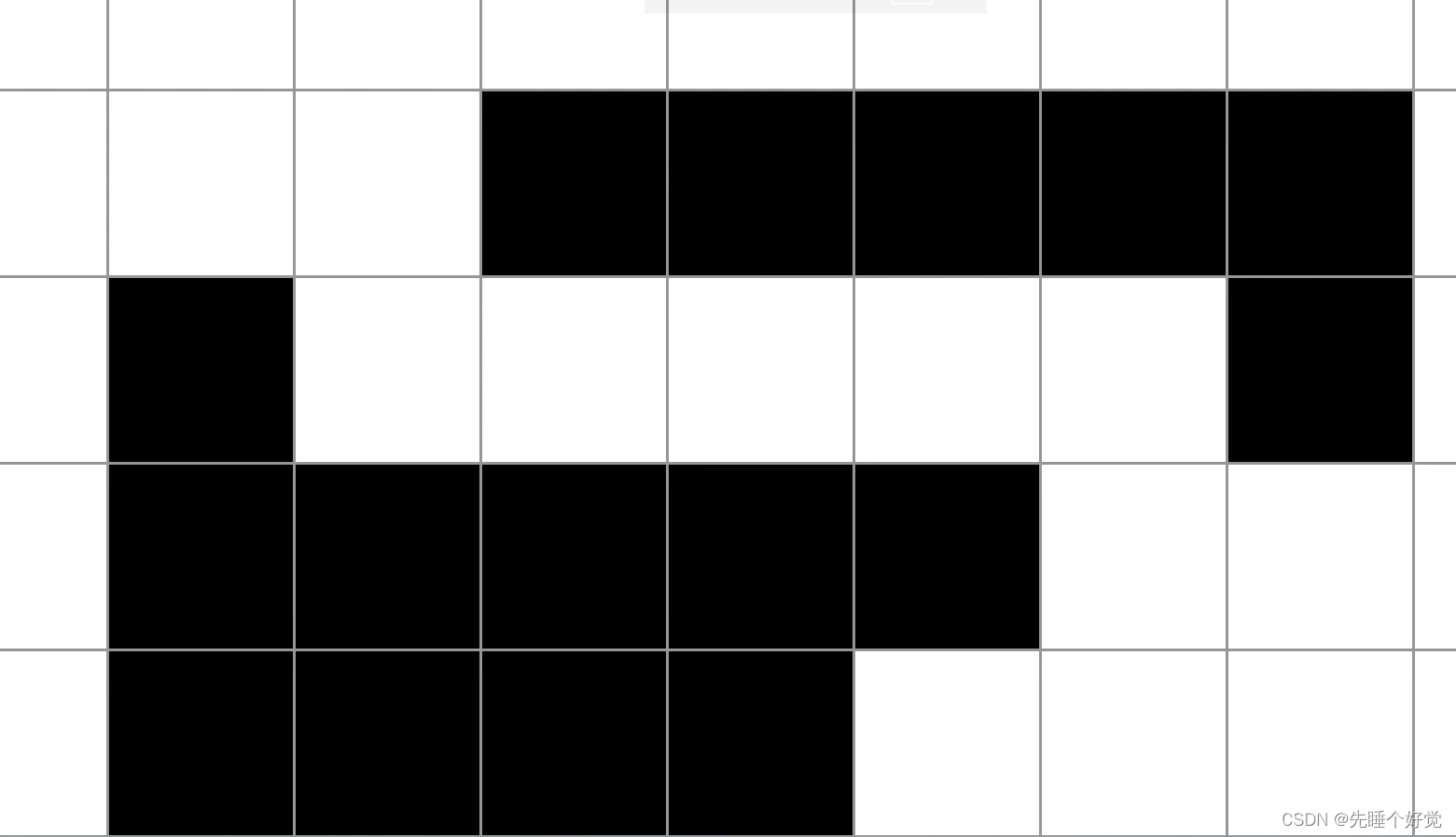
三、将障碍物隐藏掉,就得到栅格舆图。
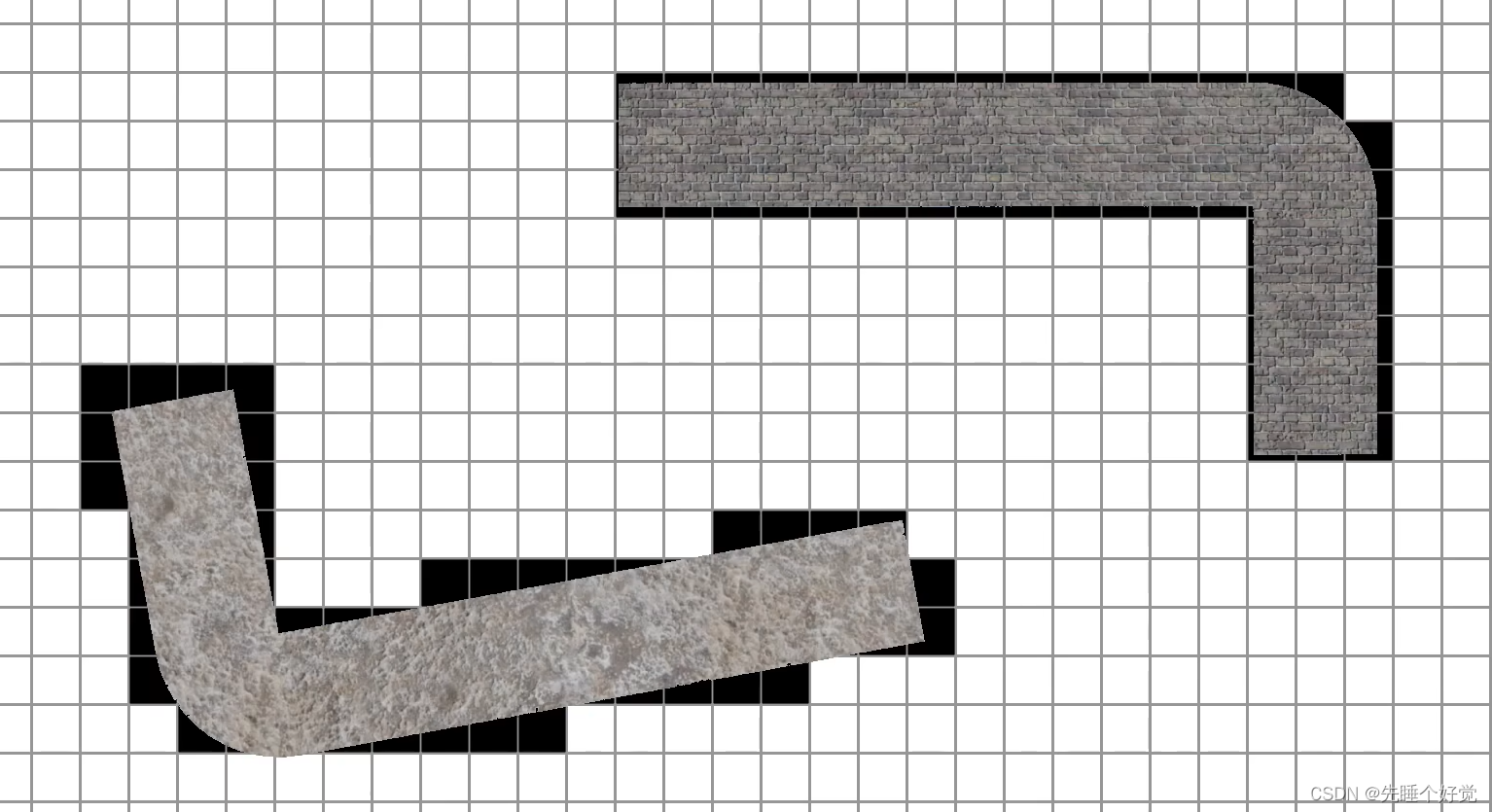
四、栅格的尺寸划分的越小,玄色的地区越接近障碍物的轮廓;但栅格越小,栅格就越多,舆图的数据量就越大。
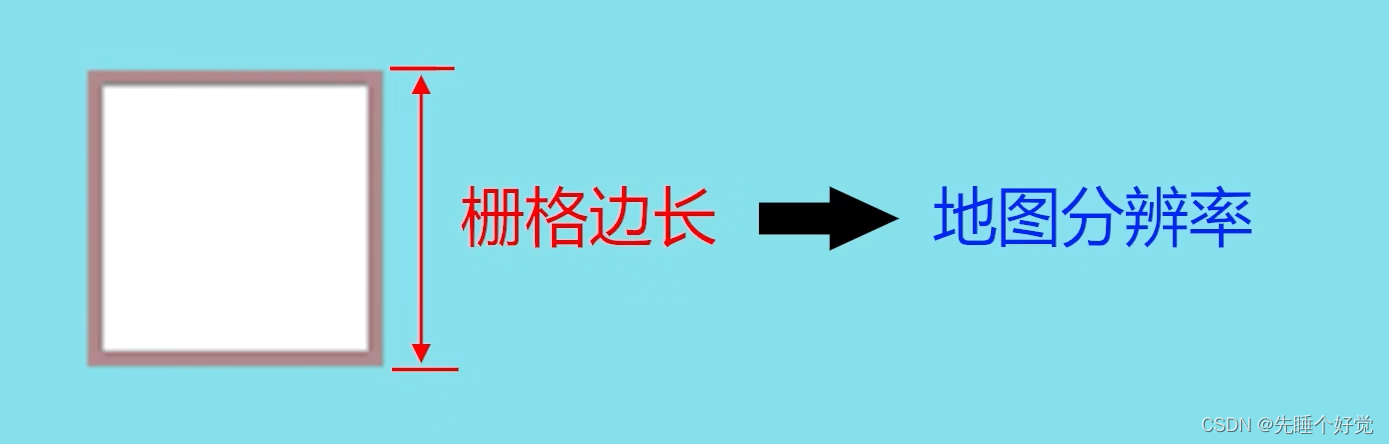
五、栅格的边长,就是栅格舆图的分辨率,ROS中的栅格边长默以为5CM
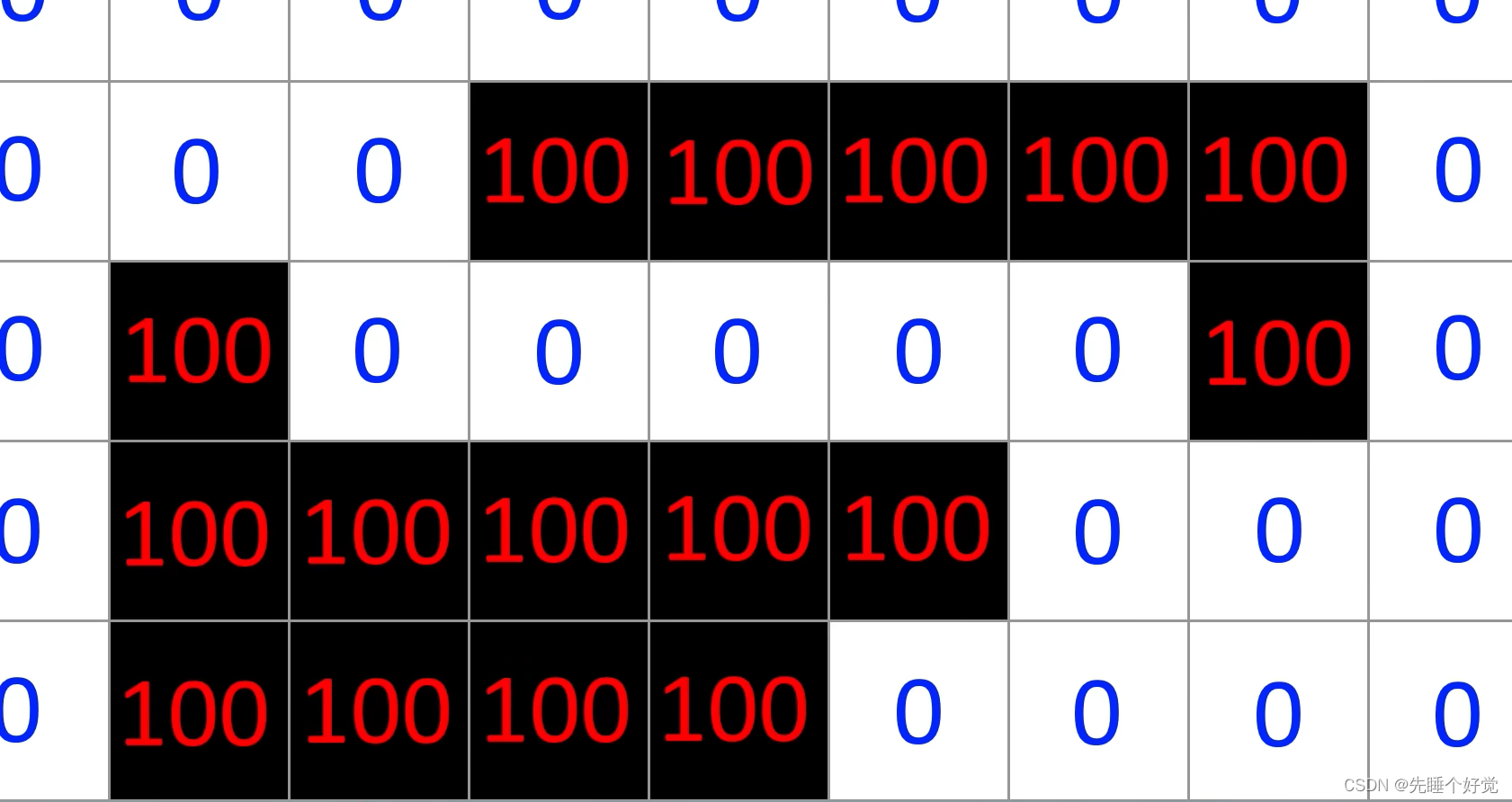
六、将栅格里的颜色用一个数字来表示,例如白色是数字0,玄色是数字100,
七、再将栅格舆图自下而上,从左向右一行一行拼接起来,就得到一个数组,这个数组便描述了这个栅格舆图的信息。
八、这个数组就是OccupancyGrid消息包的数据内容。
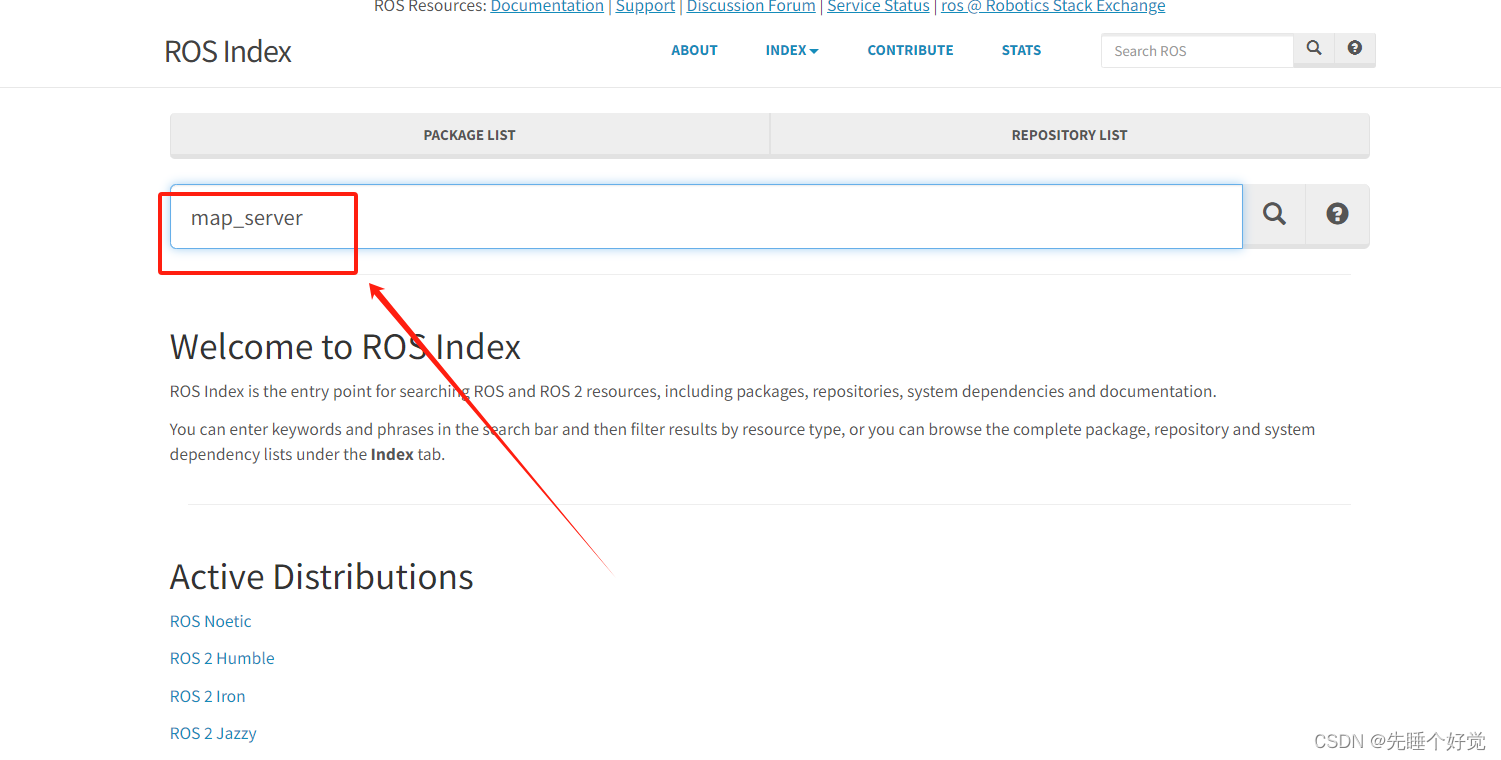
九、去ROS的官方网站查看一下这个消息包,起首浏览器搜刮ROS index
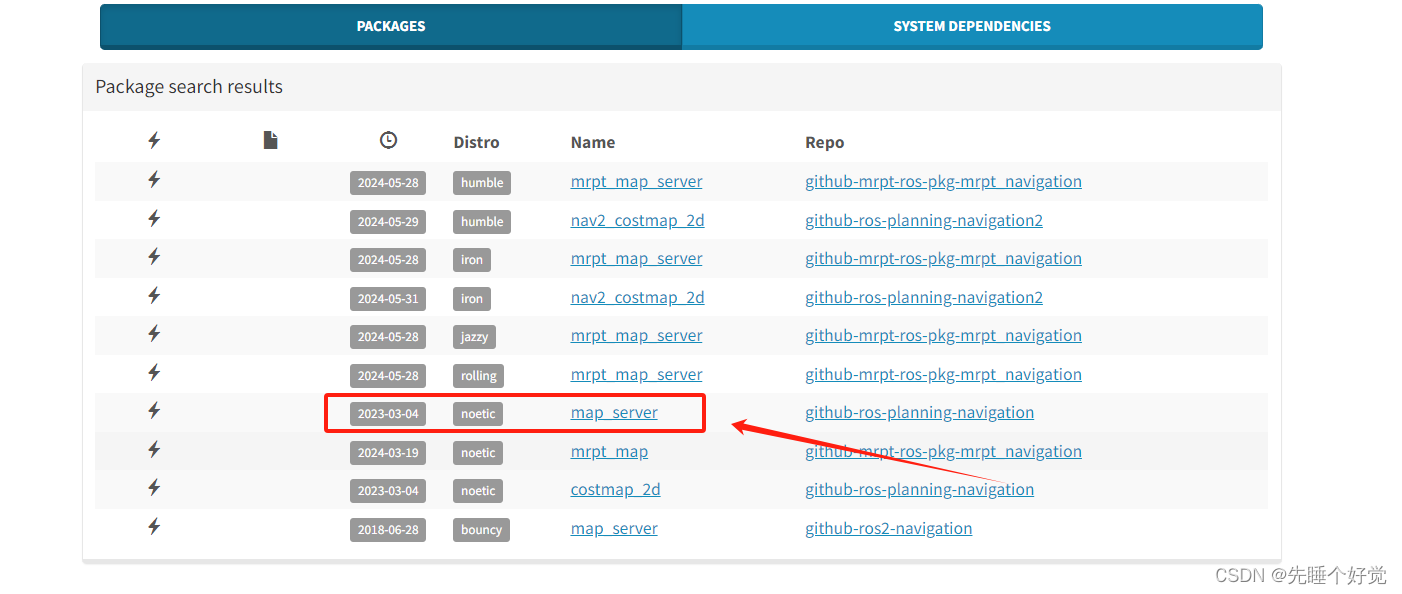
十、然后搜刮map_server节点。
十一、找到noetic的版本
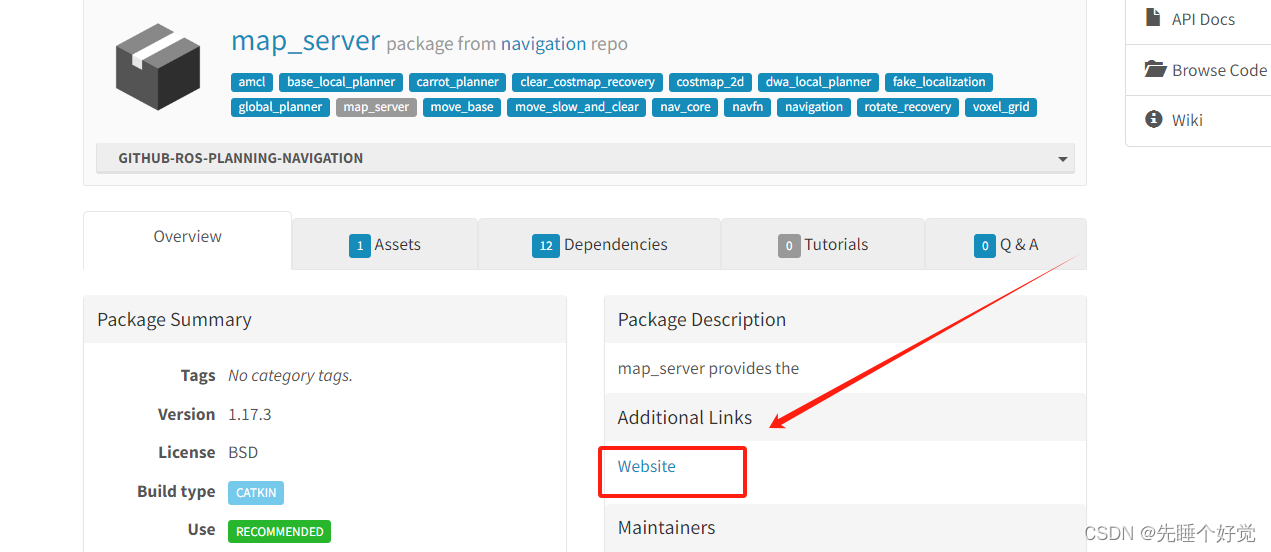
十二、点击Website
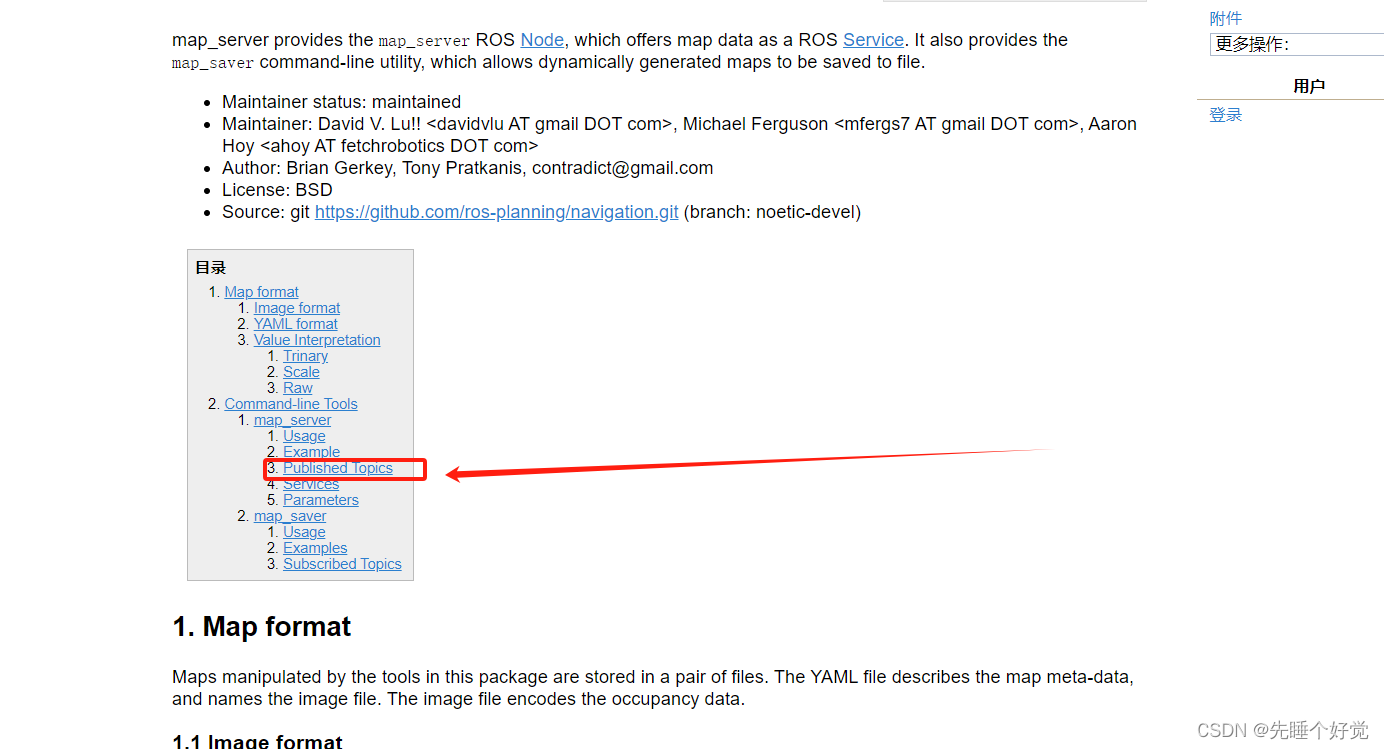
十三、点击Published Topics
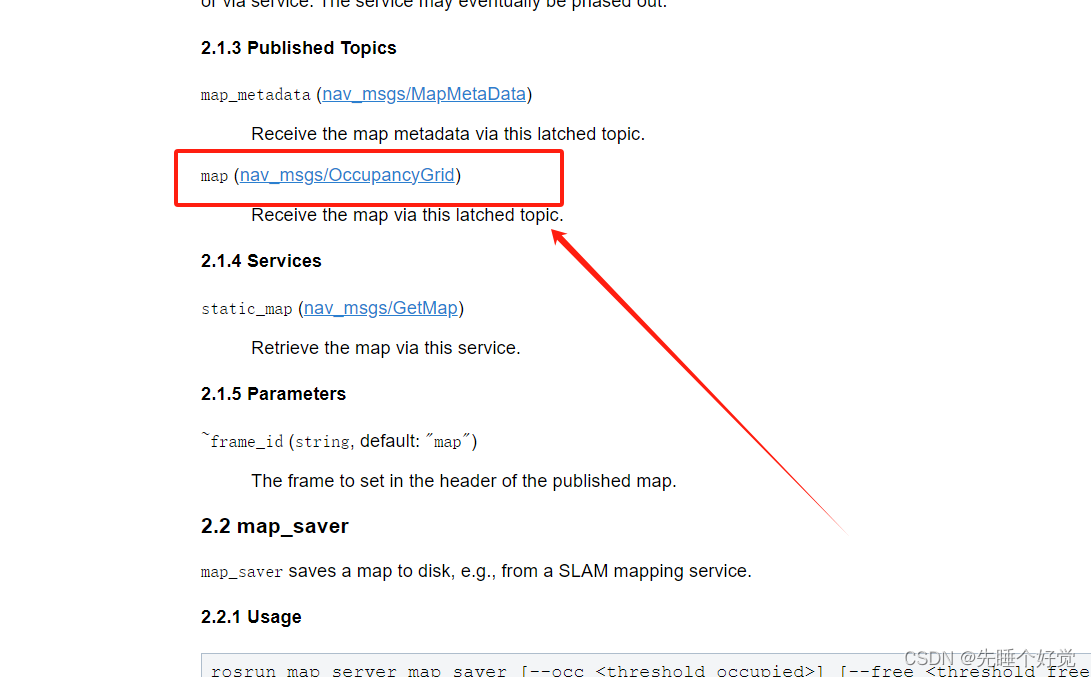
十四、可以看到这个map话题,消息范例是nav_msgs/OccupancyGrid,点击它
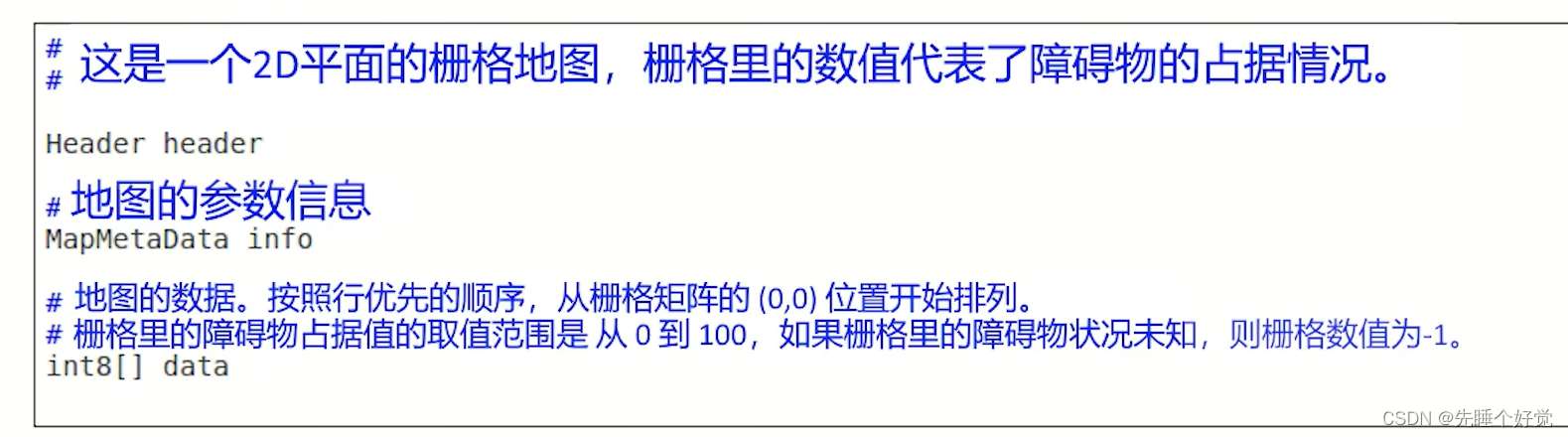
十五、可以看到这个消息范例的数据结构,里面有三个成员
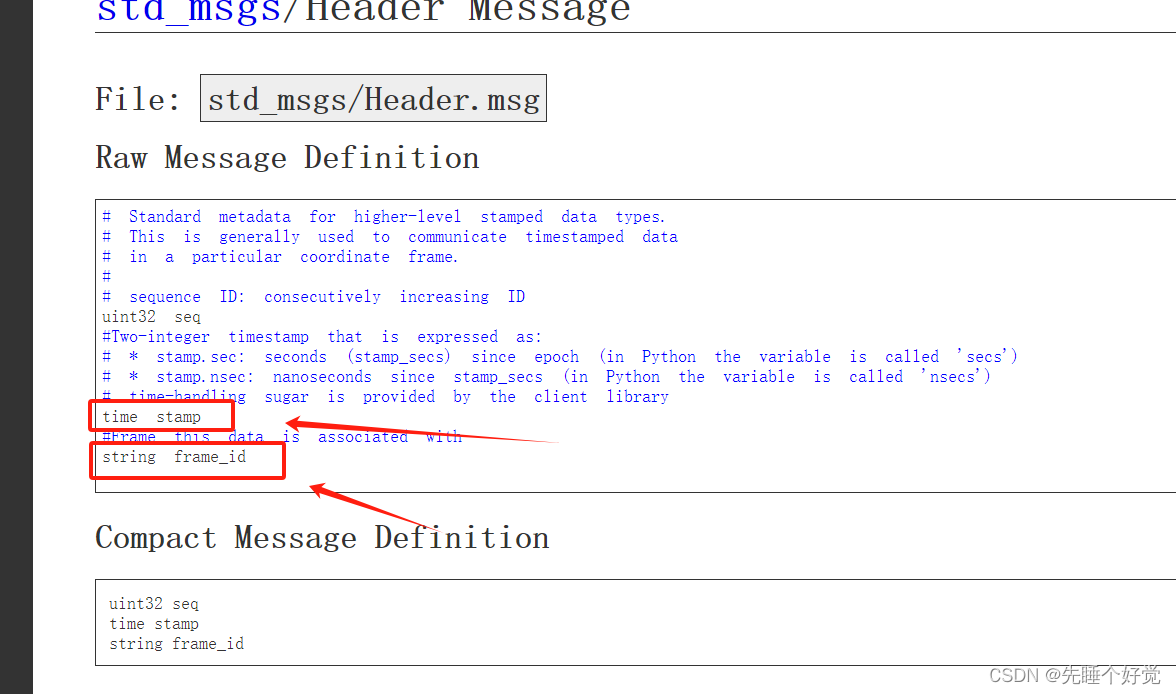
十六、header里是时间戳和坐标系ID
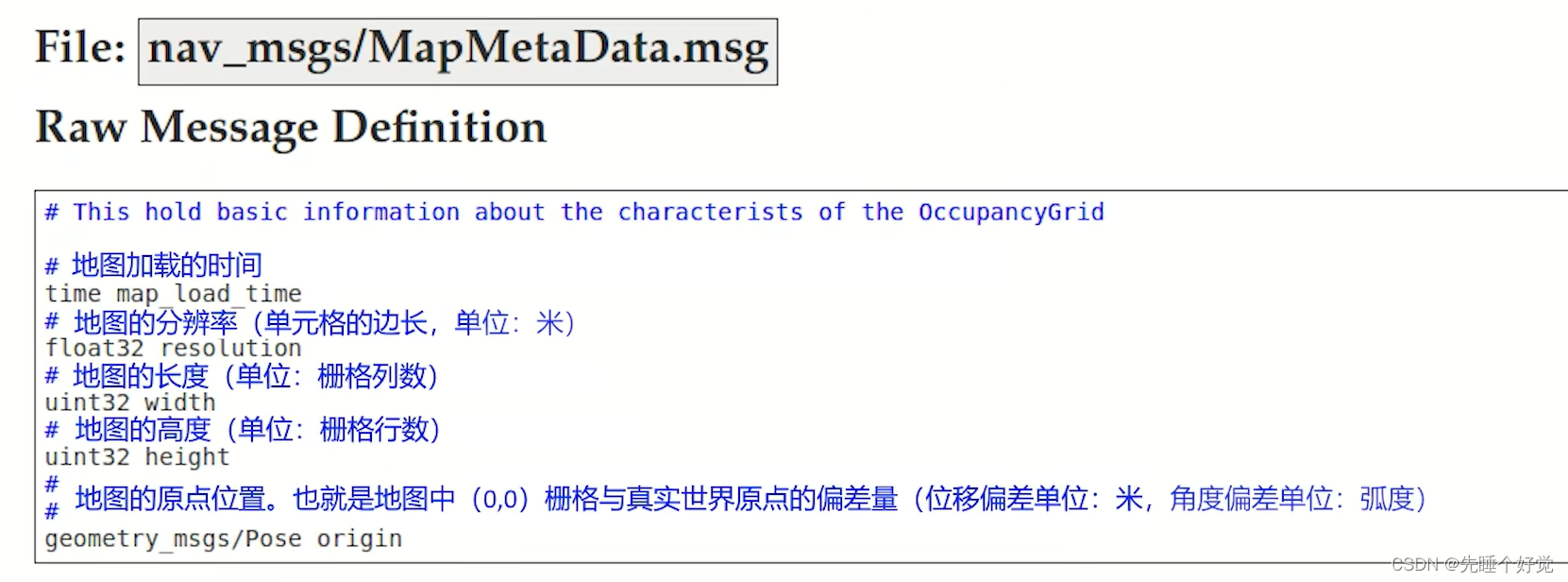
十七、info里面是舆图的描述信息
十八、data便是描述栅格舆图的数组
免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作!更多信息从访问主页:qidao123.com:ToB企服之家,中国第一个企服评测及商务社交产业平台。
欢迎光临 IT评测·应用市场-qidao123.com (https://dis.qidao123.com/)
Powered by Discuz! X3.4