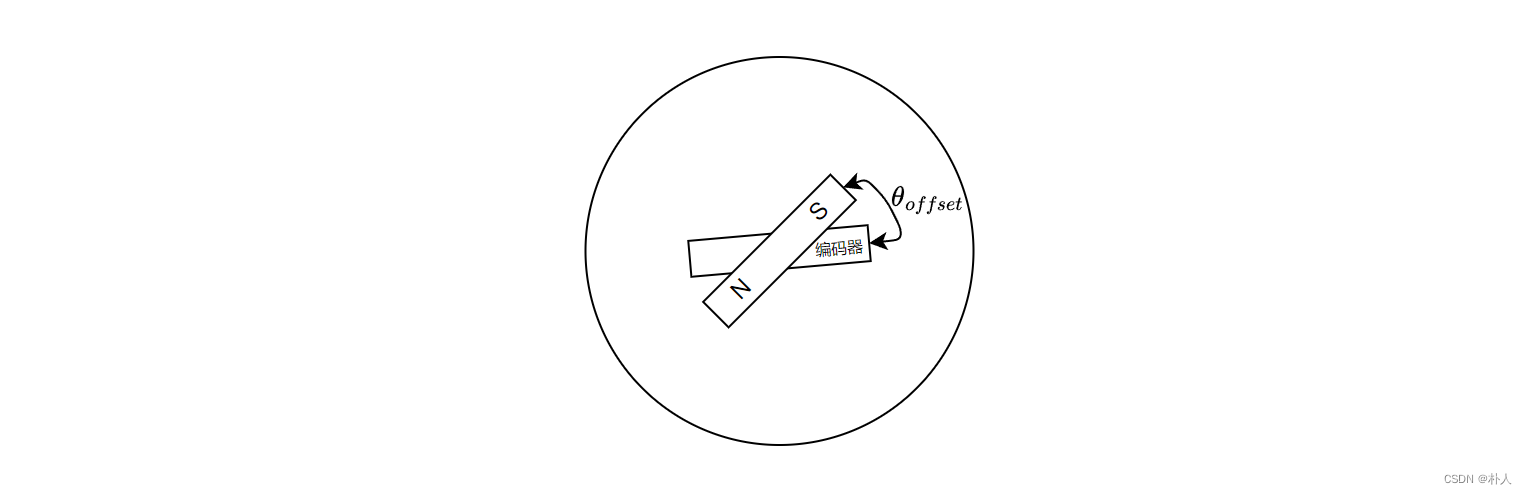
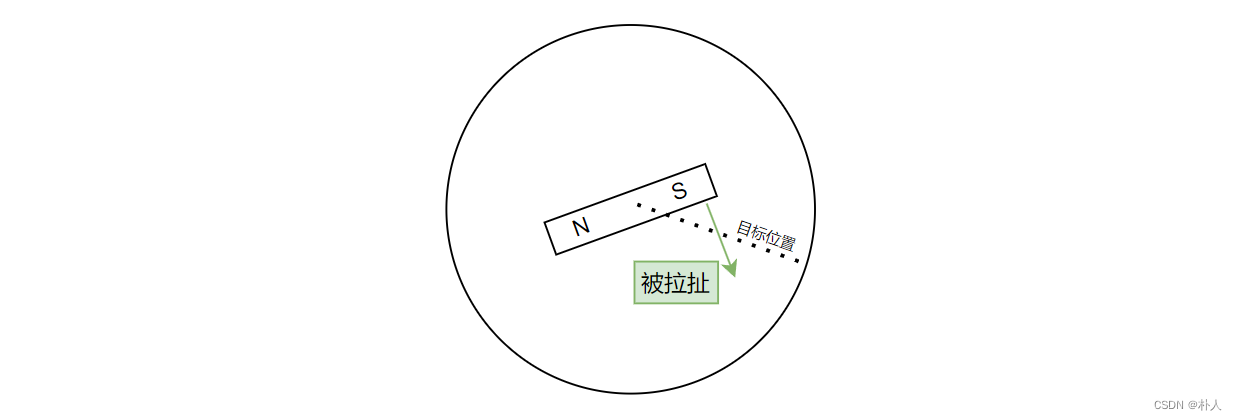
单独位置的FOC控制框图如下图。图中的意思是输入一个目的位置,与编码器计算得到的角度进行差值计算,然后输入pid控制器,只控制转子q轴强度,d轴强度直接设置为0,最后将dq轴强度(0~1之间)输入到前文推导得到的SVPWM函数中,输出得到uvw桥臂的pwm占空比。这里要注意的是输入的目的位置 θ i n \theta_{in} θin可以是转子角度或者编码器角度或者多圈角度,只要与反馈的 θ \theta θ保持同一种角度即可。
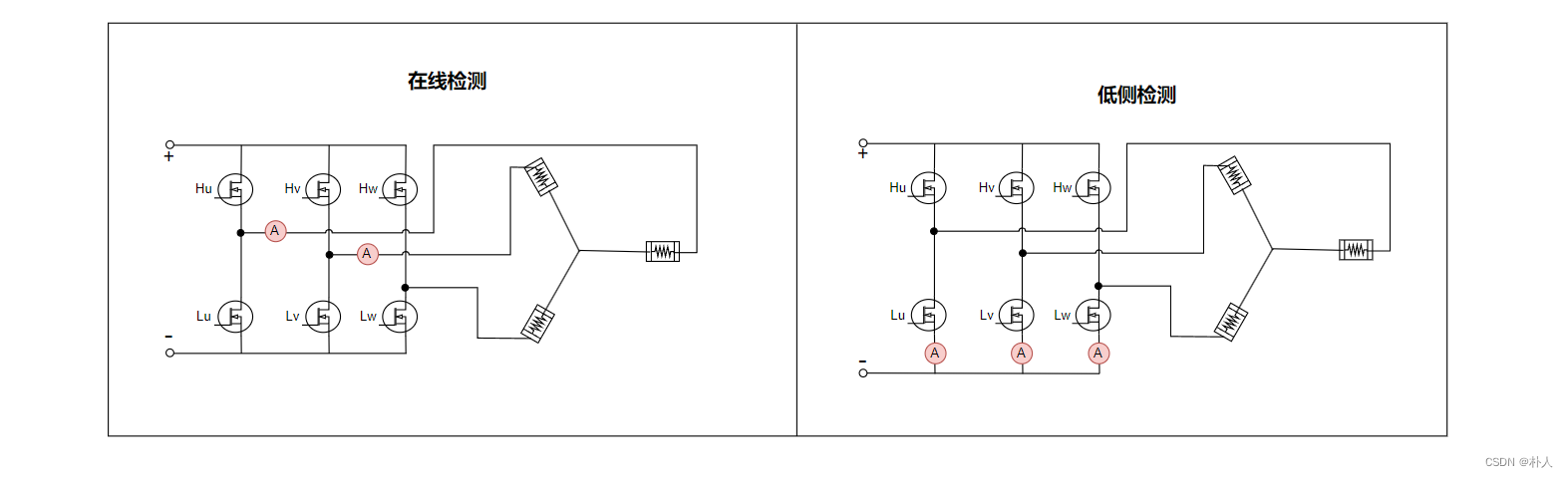
由于一个节点流出电流+流入电流=0,因此三个相线只需要两个电流检测单元即可。但是低侧检测最好使用三个电流检测单元,由于当某个桥臂的pwm占空比为1或者靠近1时,该下桥臂将没有电流颠末或者电流不稳固,三个相线就只剩下一个电流检测能够正常收罗电流,有三个电流检测单元后,可以三个都读取电流,根据占空比情况选择此中两个电流值,另一个通过电流总和为0进行计算。在线检测则没有该困扰,由于不管下桥臂是否处于关闭状态,相线始终有电流颠末。由于在线检测位置的电压比较大,因此在线检测的电流检测单元需要能够承受较大电压,价格比较高。
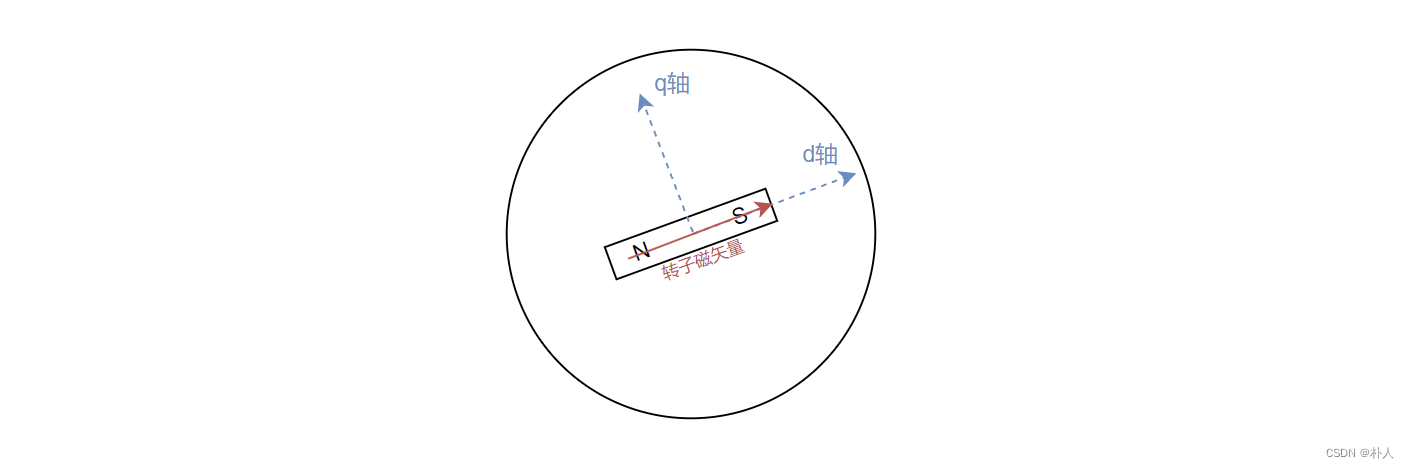
得到三个相线电流后,接下来想办法转换为dq轴电流。可以将相线电流投影到dq轴上,这样就能直接得到dq轴电流了,不过如今主流做法是先将dq轴投影到 α \alpha α轴和 β \beta β轴(这步称为clark变换),再将 α \alpha α轴和 β \beta β轴电流投影到dq轴(这步称为park变换),由于在更高级的无位置传感器FOC中会用到 α \alpha α轴和 β \beta β轴电流。 clark变换:
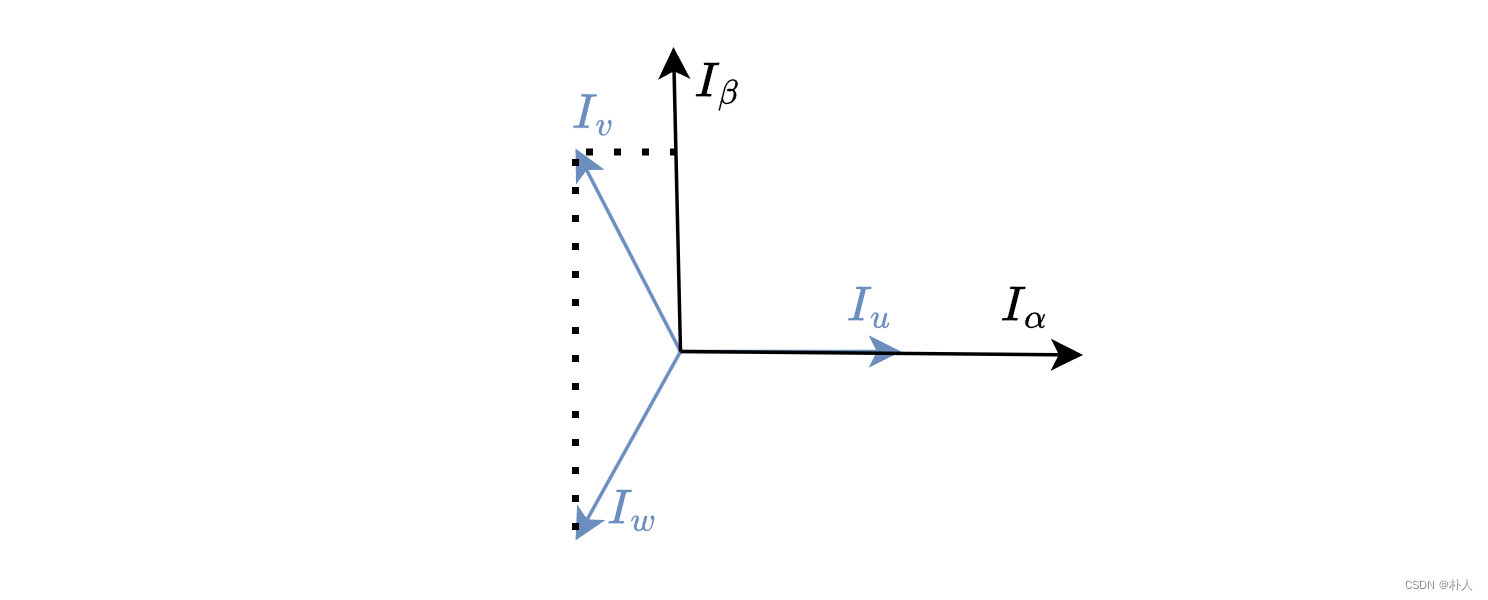
将三相电流 I u , I v , I w I_u,I_v,I_w Iu,Iv,Iw投影到 I α , I β I_\alpha,I_\beta Iα,Iβ上,从下图的多少关系可以看出,投影表达式为:
{ I α = I u − I v ∗ cos 6 0 ° − I w ∗ cos 6 0 ° I β = I v ∗ cos 3 0 ° − I w ∗ cos 3 0 ° \begin{cases} I_\alpha=I_u-I_v*\cos{60^{\degree}}-I_w*\cos{60^{\degree}} \\ I_\beta=I_v*\cos{30^{\degree}}-I_w*\cos{30^{\degree}} \end{cases} {Iα=Iu−Iv∗cos60°−Iw∗cos60°Iβ=Iv∗cos30°−Iw∗cos30°
park变换:
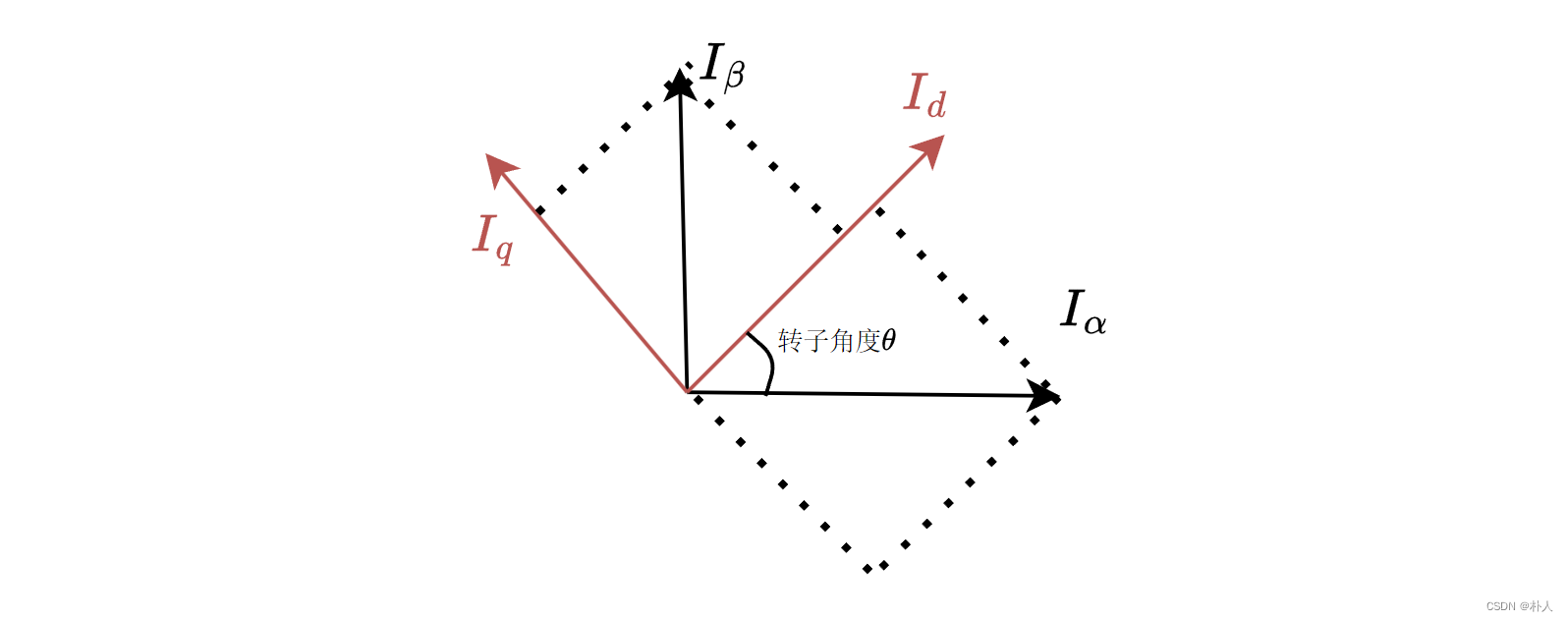
将 I α , I β I_\alpha,I_\beta Iα,Iβ轴投影到dq轴(实际上就是乘以一个旋转矩阵),从下图的多少关系可以看出,投影表达式为:
{ I d = I α ∗ cos θ + I β ∗ sin θ I q = − I α ∗ sin θ + I β ∗ cos θ \begin{cases} I_d=I_\alpha*\cos{\theta}+I_\beta*\sin{\theta} \\ I_q=-I_\alpha*\sin{\theta}+I_\beta*\cos{\theta} \end{cases} {Id=Iα∗cosθ+Iβ∗sinθIq=−Iα∗sinθ+Iβ∗cosθ