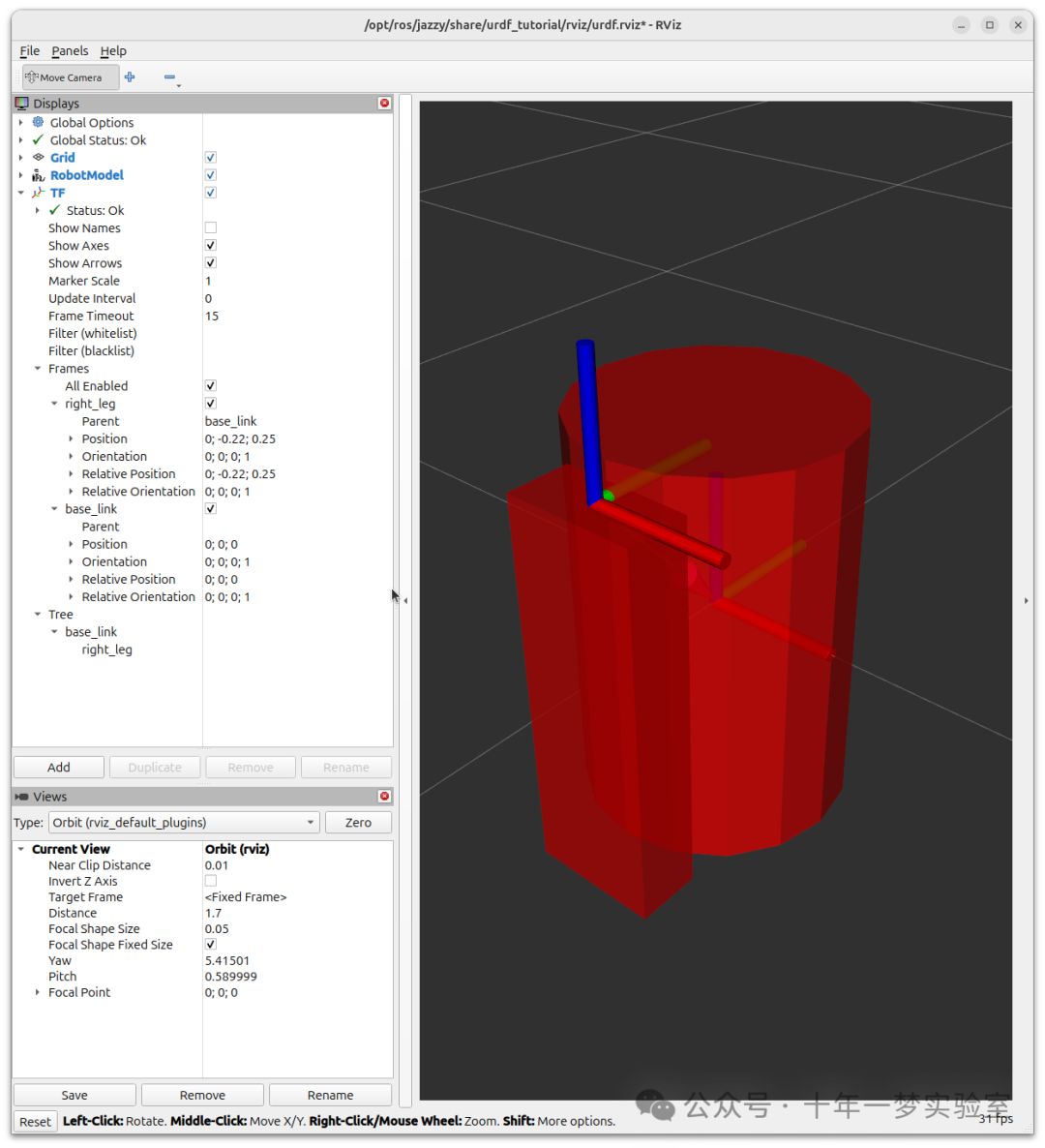
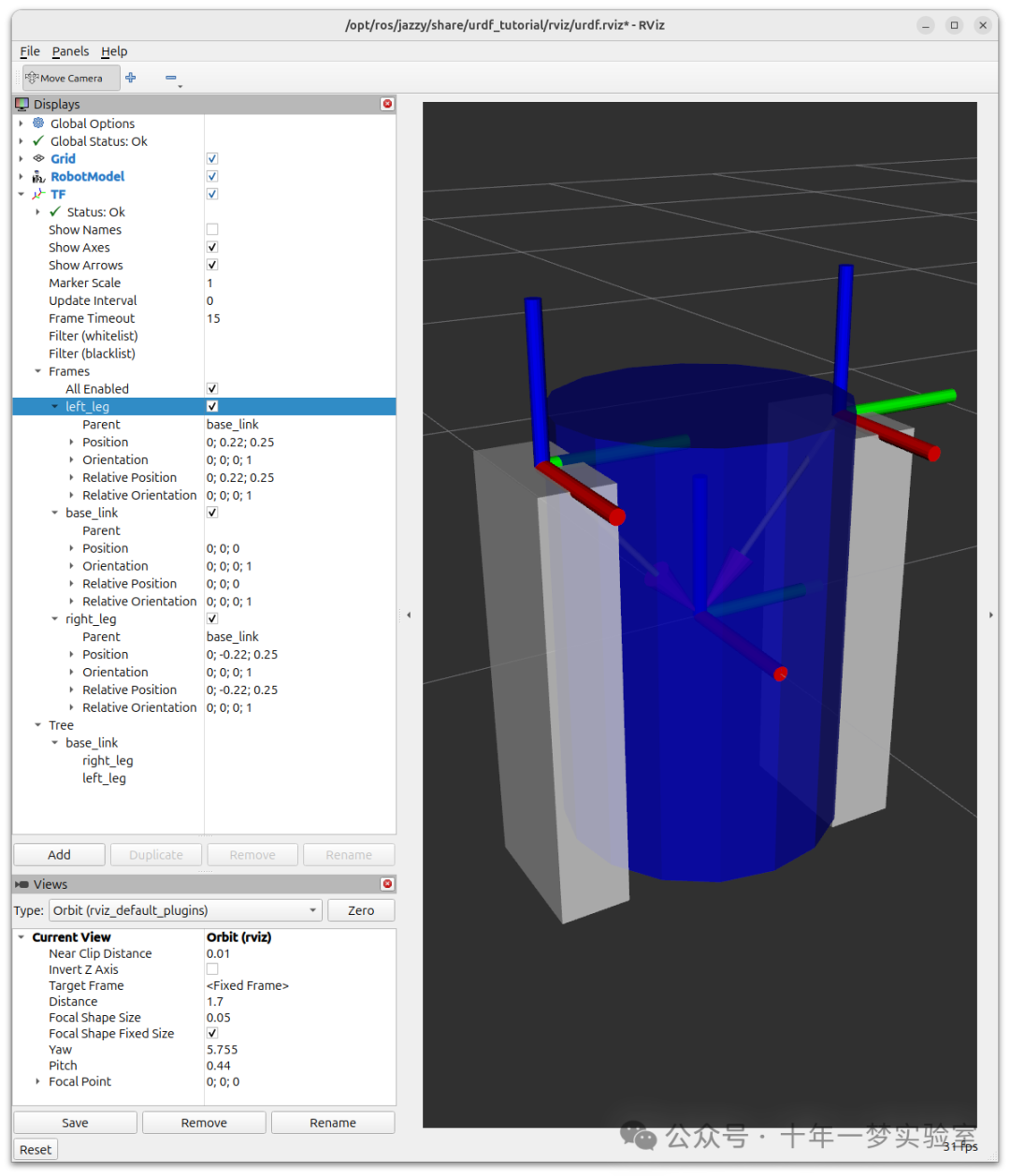
让我们首先查抄关节的原点。它是根据父参考系定义的。因此,我们在 y 方向上是 -0.22 米(向我们的左边,但相对于轴向右),在 z 方向上是 0.25 米(向上)。这意味着子 link 的原点将向上和向右,无论子链接的视觉原点标签怎样。由于我们没有指定 rpy(滚转俯仰偏航)属性,子框架默认将具有与父框架雷同的方向。
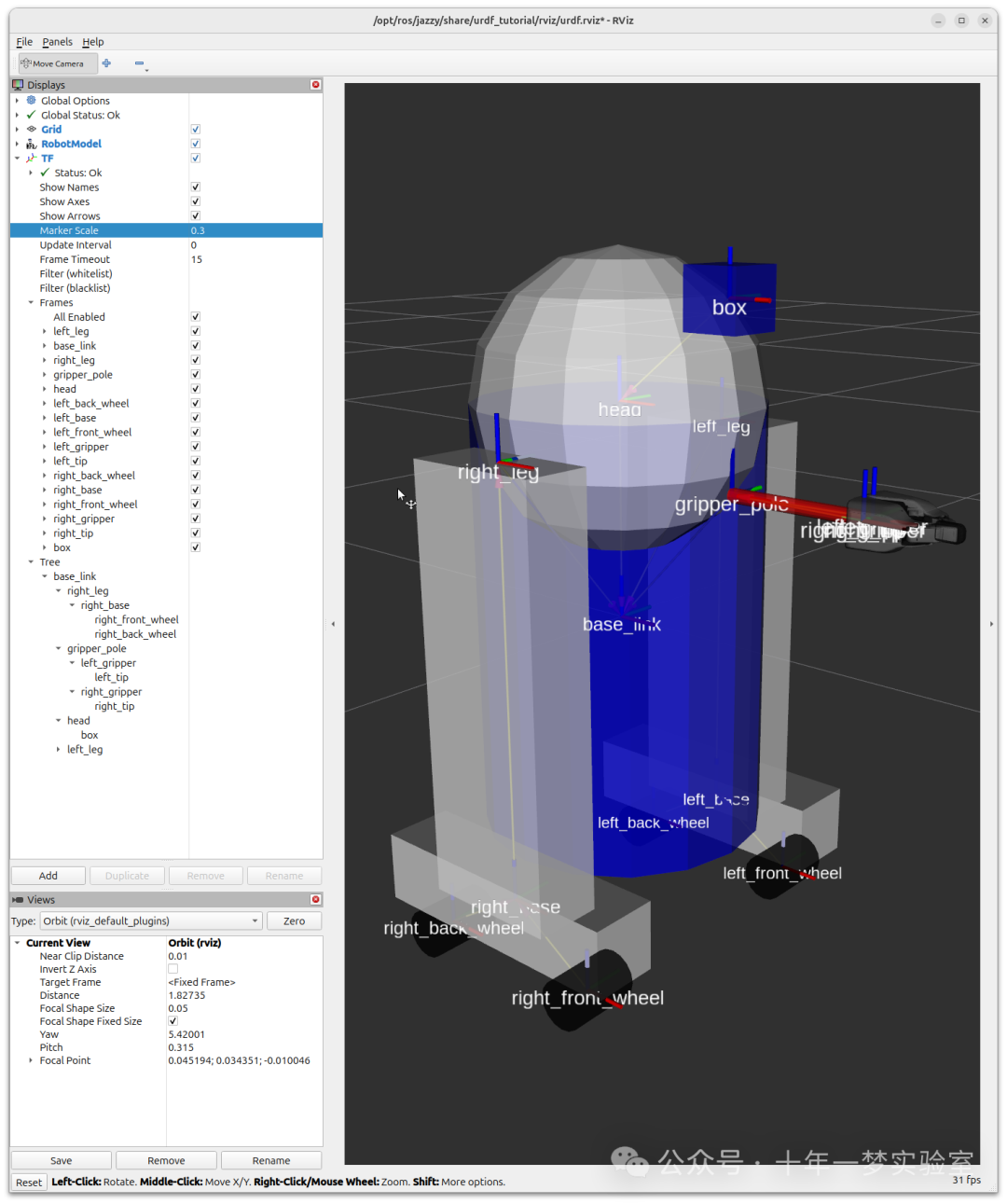
如今,看看腿的视觉原点,它有一个 xyz 和 rpy 偏移。这定义了视觉元素的中心相对于其原点的位置。由于我们希望腿部连接在顶部,我们通过将 z 偏移设置为 -0.3 米来向下偏移原点。由于我们希望腿的长部分与 z 轴平行,我们将视觉部分绕 Y 轴旋转 PI/2。