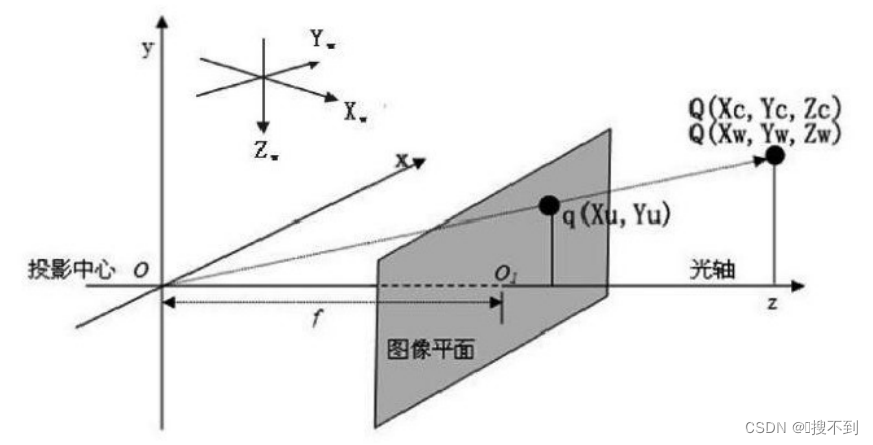
点 O O O是相机的光心,为相机坐标系的原点;点 O 1 O_1 O1是相机光轴与图像平面的交点,为图像平面的中央;空间中某点 Q Q Q在相机坐标系与世界坐标系的坐标分别为 ( X c , Y c , Z c ) (X_c,Y_c,Z_c) (Xc,Yc,Zc)和 ( X w , Y w , Z w ) (X_w,Y_w,Z_w) (Xw,Yw,Zw);点 q q q为 Q Q Q经成像投影后所得,在图像坐标系下的坐标为 ( X u , Y u ) (X_u,Y_u) (Xu,Yu); f f f为相机焦距,表现光心 O O O到图像平面的距离。
由相似三角形原理,可以得到:
{ X u f = X c Z c ⇒ X u = f X c Z c Y u f = Y c Z c ⇒ Y u = f Y c Z c \begin{cases}\dfrac{X_u}{f}=\dfrac{X_c}{Z_c}\Rightarrow X_u=f\dfrac{X_c}{Z_c}\\\dfrac{Y_u}{f}=\dfrac{Y_c}{Z_c}\Rightarrow Y_u=f\dfrac{Y_c}{Z_c}\end{cases} ⎩ ⎨ ⎧fXu=ZcXc⇒Xu=fZcXcfYu=ZcYc⇒Yu=fZcYc
通常,图像坐标系的原点不是相机光轴与图像平面的交点 O 1 O_1 O1,而是在图像的右上角,且与成像平面还存在一个缩放变换。
设 O 1 O_1 O1与图像坐标系原点的偏移量为 ( X 0 , Y 0 ) (X_0,Y_0) (X0,Y0),图像坐标系与成像平面在 X 轴与 Y 轴方向的缩放倍数分别为 f x f_x fx与 f y f_y fy:
{ X u = f x X c Z c + X 0 Y u = f y Y c Z c + Y 0 \begin{cases}X_u=f_x \dfrac{X_c}{Z_c}+X_0\\\\Y_u=f_y \dfrac{Y_c}{Z_c}+Y_0\end{cases} ⎩ ⎨