 C++、ROS 和 SLAM 是什么关系?
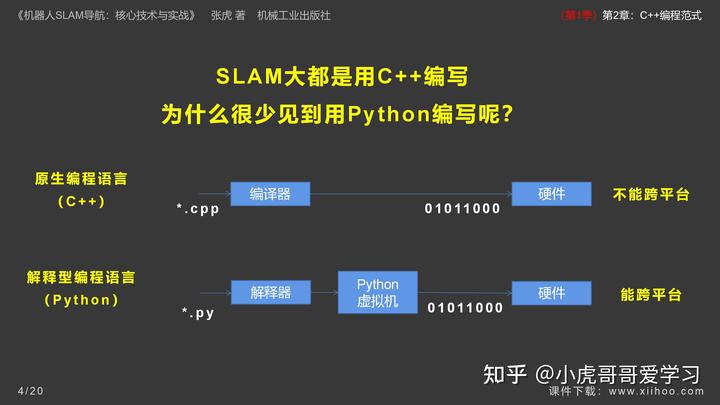
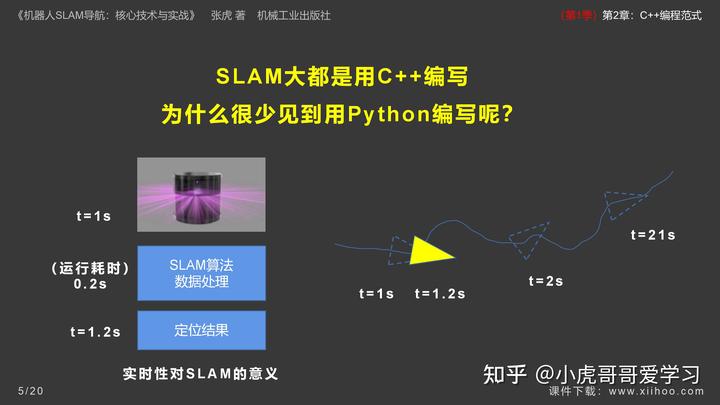
C++、ROS 和 SLAM 是什么关系?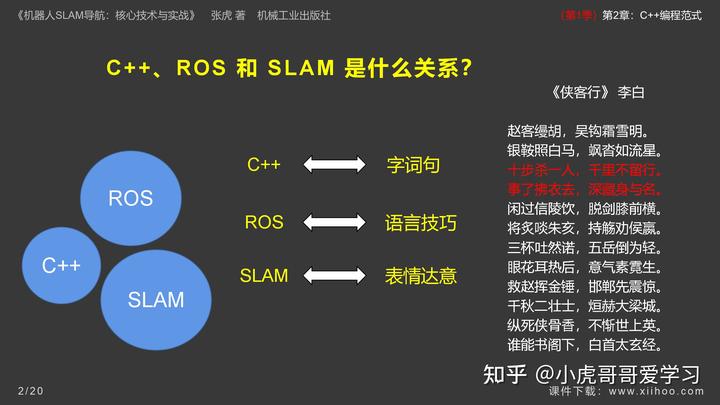 SLAM大都是用C++编写,为什么很少见到用Python编写呢?实时性方面,C++要优于Python。Python是对程序员友好的编程语言。C++是对计算机友好的编程语言。
SLAM大都是用C++编写,为什么很少见到用Python编写呢?实时性方面,C++要优于Python。Python是对程序员友好的编程语言。C++是对计算机友好的编程语言。
 2.1 C++工程的组织结构C++工程的一般组织结构C++工程在机器人中的组织结构
2.1 C++工程的组织结构C++工程的一般组织结构C++工程在机器人中的组织结构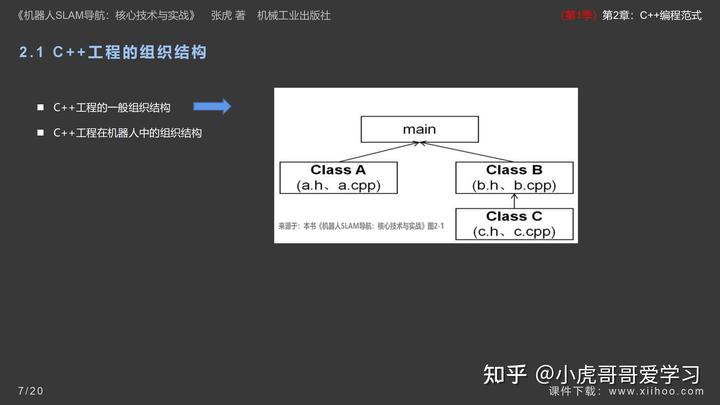 ①如何理解ROS接口的作用②从Cartographer代码来理解接口实现
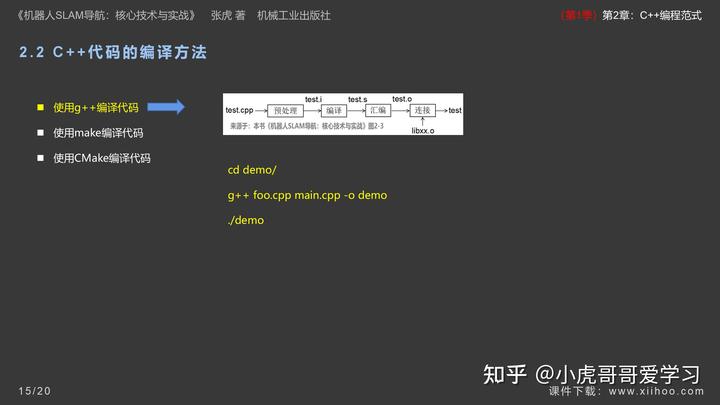
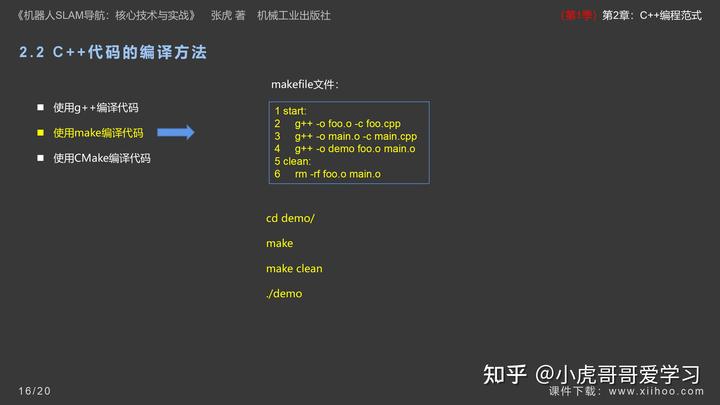
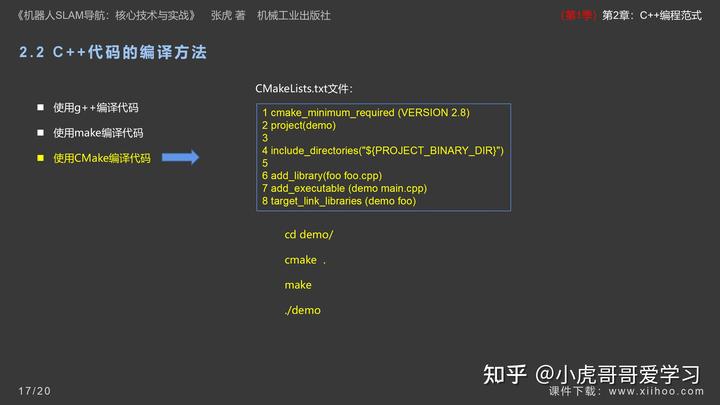
①如何理解ROS接口的作用②从Cartographer代码来理解接口实现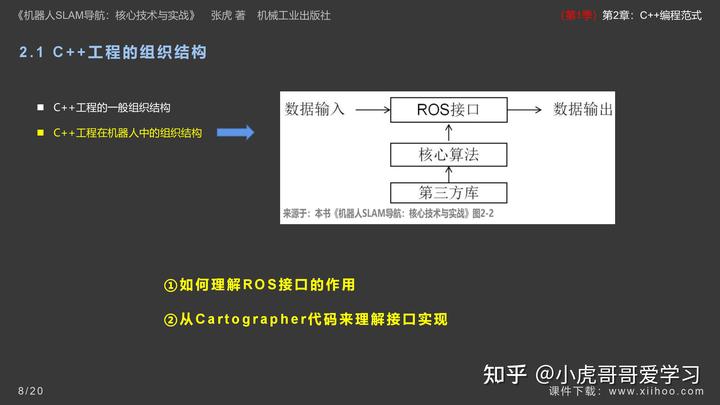 2.2 C++代码的编译方法使用g++编译代码使用make编译代码使用CMake编译代码
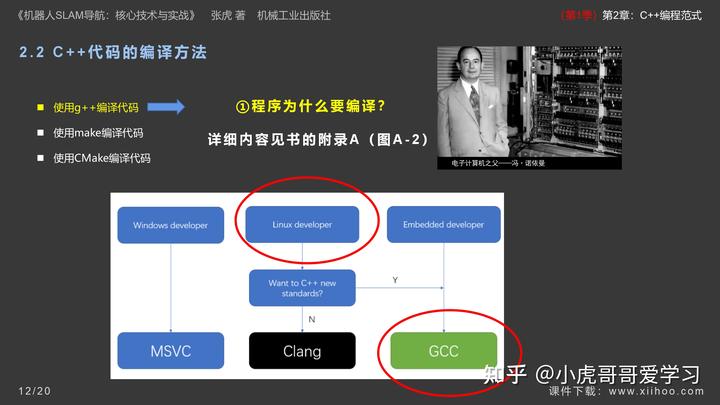
2.2 C++代码的编译方法使用g++编译代码使用make编译代码使用CMake编译代码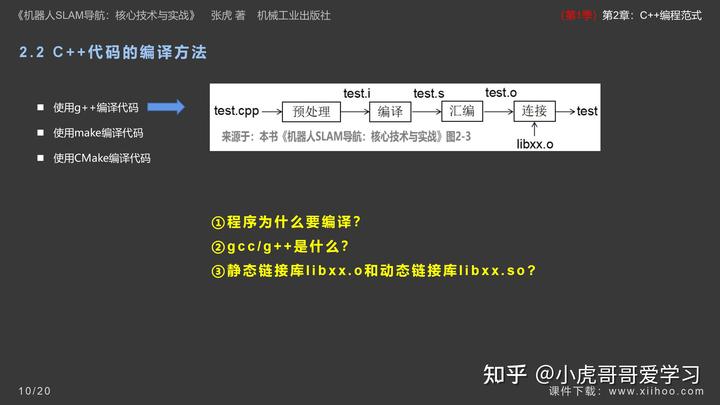 ①程序为什么要编译?MSVC/GCC/Clang
①程序为什么要编译?MSVC/GCC/Clang
 ②gcc/g++是什么?
②gcc/g++是什么?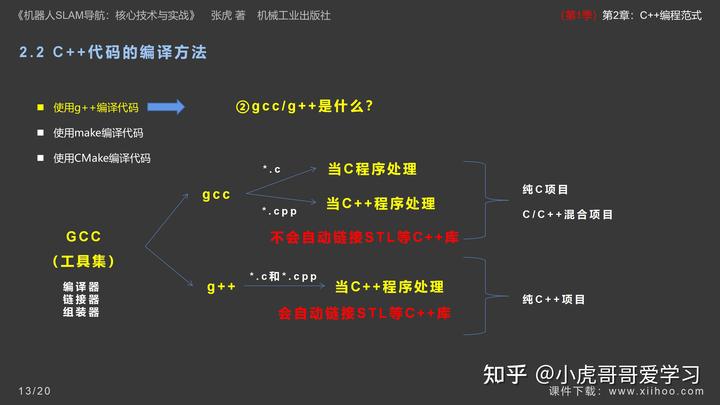 ③静态链接库libxx.o和动态链接库libxx.so?
③静态链接库libxx.o和动态链接库libxx.so?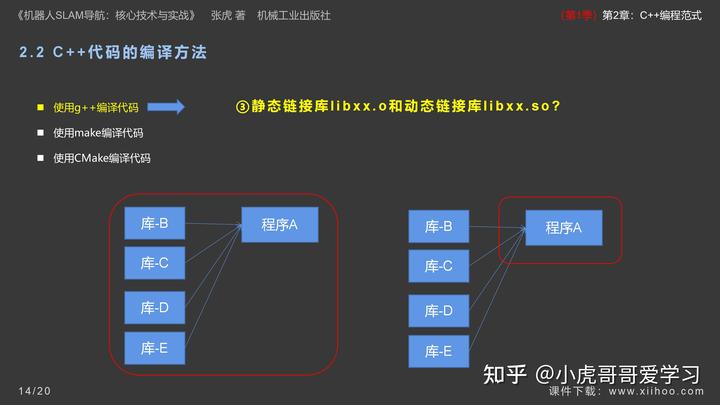
 2.3 C++编程风格指南头文件规范作用域规范类规范命名约定①规避低级错误②提高团队开发效率③便于维护升级
2.3 C++编程风格指南头文件规范作用域规范类规范命名约定①规避低级错误②提高团队开发效率③便于维护升级 例程源码下载
例程源码下载| 欢迎光临 ToB企服应用市场:ToB评测及商务社交产业平台 (https://dis.qidao123.com/) | Powered by Discuz! X3.4 |