




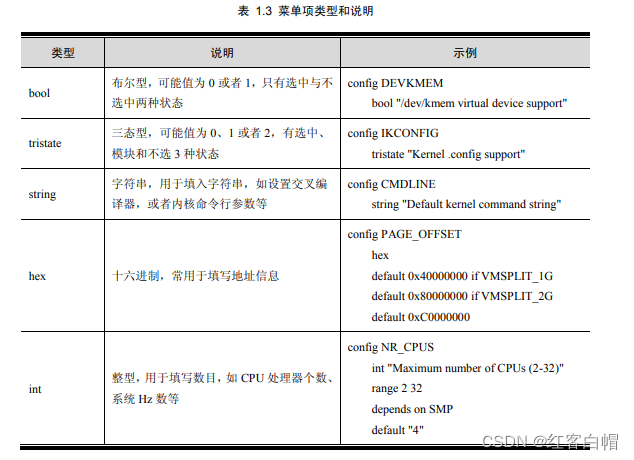
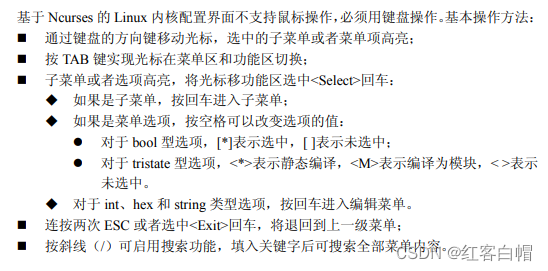
对于三态选项,在配置界面用< >表示:
- ARCH ?= $(SUBARCH)
- SUBARCH := $(shell uname -m | sed -e s/i.86/i386/ -e s/sun4u/sparc64/ \
- -e s/arm.*/arm/ -e s/sa110/arm/ \
- -e s/s390x/s390/ -e s/parisc64/parisc/ \
- -e s/ppc.*/powerpc/ -e s/mips.*/mips/ \
- -e s/sh[234].*/sh/ )
- $make ARCH=arm
默认值:有写选项可以设置默认值,无论是哪种类型,都可以通过 default 设置其默认值,例如:
- CROSS_COMPILE ?= $(CONFIG_CROSS_COMPILE:"%"=%)
- ……
- AS = $(CROSS_COMPILE)as
- LD = $(CROSS_COMPILE)ld
- CC = $(CROSS_COMPILE)gcc
- CPP = $(CC) –E
- AR = $(CROSS_COMPILE)ar
- NM = $(CROSS_COMPILE)nm
- STRIP = $(CROSS_COMPILE)strip
- OBJCOPY = $(CROSS_COMPILE)objcopy
- OBJDUMP = $(CROSS_COMPILE)objdump
前面这个示例表明,选中 ARM后,会自动选中HAVE_AOUT。 依赖关系:如果一个选项能否生效与否与其它选项的设置有关,则必须通过 depends on 来声明这种依赖关系。例如,只有使能了 SMP 才能设置 CPU 个数变量 NR_CPUS,在Kconfig中则写成:
- $ make ARCH=arm CROSS_COMPILE= arm-linux-gnueabihf-
菜单选项属性的每个关键字,必须用 TAB 键与行首隔开,不能用等数的空格替代。
3. 目录层次迭代
通过source可以直接引用下级目录的 Kconfig 文件,形成新的菜单项或者子菜单,这样方便每个目录独立管理各自的配置内容。“source "drivers/tty/Kconfig"”就是直接引用 文件,形成更多菜单(项)。
【1.5.2】 配置项和配置开关
通过config 定义的菜单配置项,在内核配置后会产生一个以“CONFIG_”开头的配置开关变量,该开关变量可在·Makefile 中或者源代码中使用。
例如:“config BAR”将会产生一个开关变量 CONFIG_BAR,在 Makefile 中可以这么使用:
- CROSS_COMPILE = arm-linux-gnueabihf-
- CROSS_COMPILE =/home/ctools/linux-devkit/bin/arm-linux-gnueabihf-
- obj-y += usb-host.o # 默认编译 usb-host.c 文件
- obj-y += gpio/ # 默认编译 gpio 目录
对内核进行正确配置后,才能进行编译。配置不当的内核,很有可能编译出错,或者不能正确运行。
【1.6.1】 快速配置内核
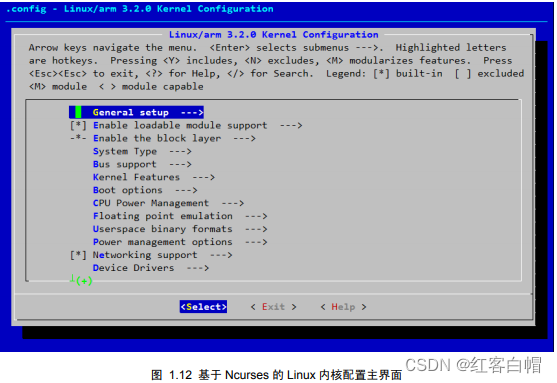
进入 Linux 内核源码数顶层目录,输入make menuconfig命令,可进入如图 1.12 所示的 基于 Ncurses 的 Linux 内核配置主界面(注意:主机须安装 ncurses 相关库才能正确运行该 命令并出现配置界面)。如果没有在 Makefile 中指定 ARCH,则须在命令行中指定:
- obj-$(CONFIG_WDT) += wdt.o # wdt.c 编译控制
- obj-$(CONFIG_PCI) += pci/ # pci 目录编译控制
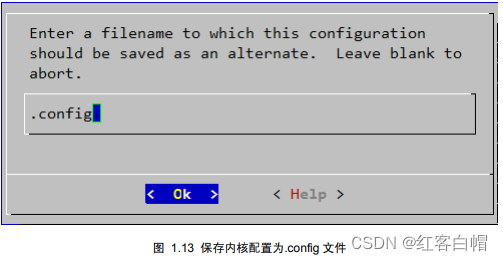
配置完毕,将光标移动到配置界面末尾,选中“Save an Alternate Configuration File”后回车,保存当前内核配置,默认配置文件名为.config,如图 1.13 所示。
保存完毕,选择退出内核配置界面,回到终端命令行。
当然,也可以将配置文件命名为其它文件名,如 config-bak 等,但该配置不会被 Makefile
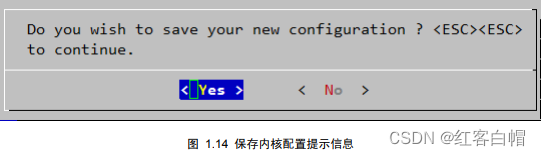
文件使用,Makefile 默认使用文件名为.config 的配置文件,所以重新命名配置文件通常在保留或者备份内核配置信息时使用。 也可以不用“Save an Alternate Configuration File”操作,连按 ESC 或选择退出内核配置界面,将会出现如图 1.14 所示的保存配置提示信息,选择后回车,内核配置将会被保存为.config 文件。
备份内核配置,在命令行下将.config 文件复制为其它文件名来得更简单快捷:
- menu "Character devices"
- source "drivers/tty/Kconfig"
- config DEVKMEM
- bool "/dev/kmem virtual device support"
- default y
- help
- Say Y here if you want to support the /dev/kmem device. The
- /dev/kmem device is rarely used, but can be used for certain
- kind of kernel debugging operations.
- When in doubt, say "N".
- ……
- endmenu
- config DEVKMEM
- bool "/dev/kmem virtual device support"
- [*] /dev/kmem virtual device support
Linux 内核配置菜单比较复杂,下面对一些比较重要的配置界面进行介绍,更多的详细配置,建议进行实际操作。另外,由于 Linux 内核版本差异,实际看到的内核配置界面可能与本节的介绍有所差异。
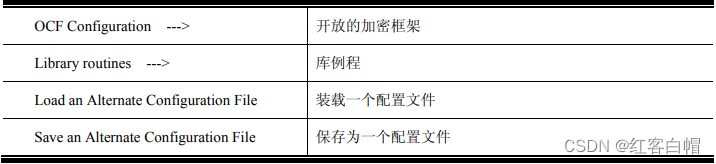
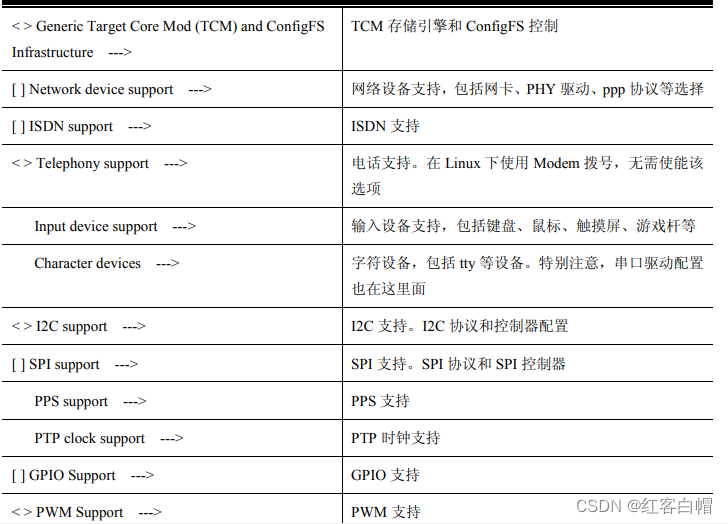
图 1.12 所示的内核配置主界面,实际包含了如表 1.4 所列的各项一级菜单。
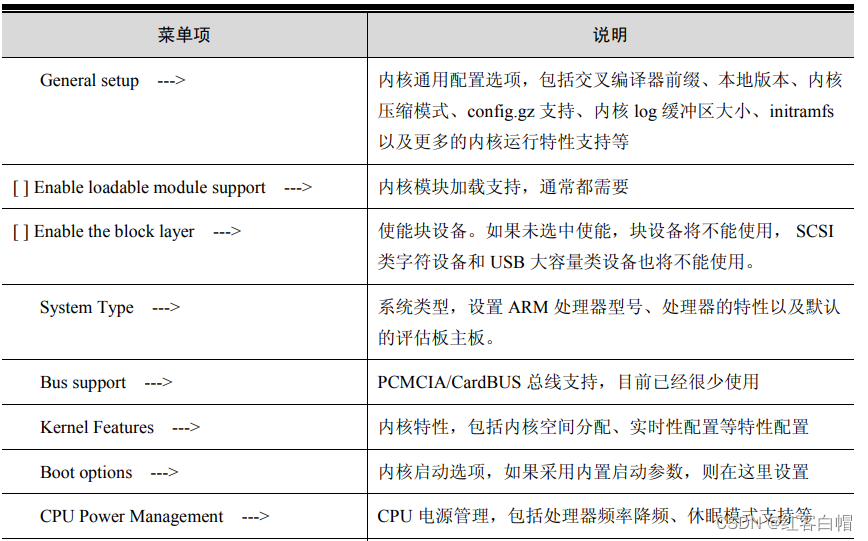

一级菜单下的每一项几乎都有复杂的下级子菜单,各自的配置选项也很丰富,每项的意义也各不相同,如果逐一进行描述,将会是一件非常繁琐的事。而实际产品开发中,并不需要完全了解内核的每一个配置项,通常只需要了解其中一些相关项即可。
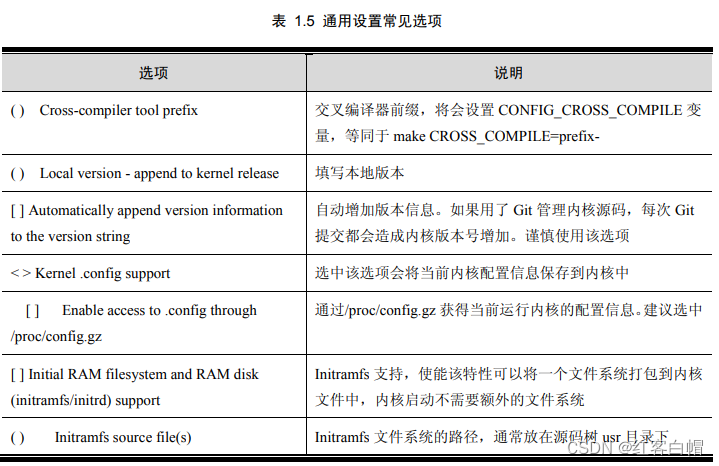
1. 通用设置
进入 General setup 是内核通用设置菜单界面,菜单选项众多,通常可以关注表 1.5 所列 选项。
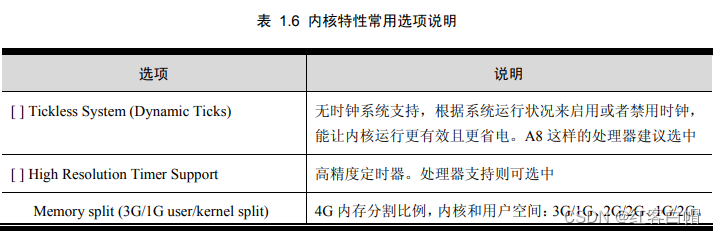
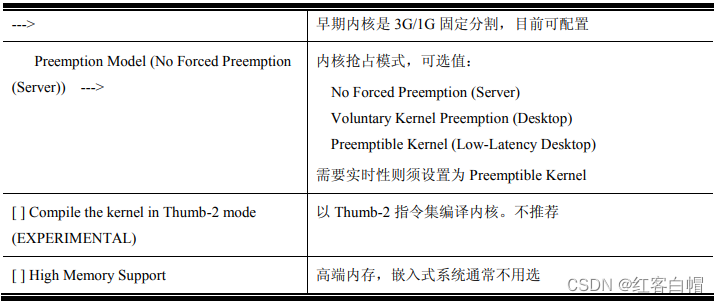
2. 内核特性
Kernel Features 是内核特性配置菜单,常用选项介绍如表 1.6 所列。
3. 启动选项
启动选项一般关心内核启动参数设置即可,可设置默认启动参数和内核参数类型。 默认启动参数通过“Default kernel command string”设置,例如:
- [*] /dev/kmem virtual device support
- <*> Kernel .config support
4. 网络支持
网络支持部分,包括了以太网、CAN、红外、蓝牙、无线等各种网络的支持配置选项。 网络选项配置。从 Networking support Networking options,可进入网络选项配置界面, 网络的配置很复杂,常用的一些配置选项和说明如表 1.7 所列。
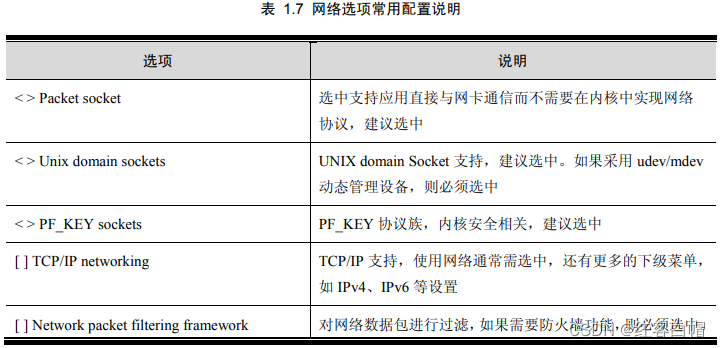
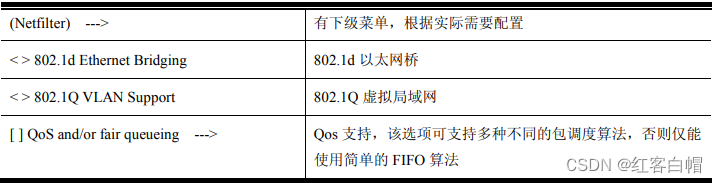
通常来说,使用Linux的系统都会用到网络,而使用网络又往往离不开 TCP/TP,故建 议在配置中选中 TCP/IP选项,并选中下级全部选项,配置后的 TCP/IP 选项如程序清单 1.2 所示。
程序清单 1.2 TCP/IP 配置
- menuconfig GENERIC_PWM
- tristate "PWM Support"
- default n
- help
- Enables PWM device support implemented via a generic
- framework. If unsure, say N.
对于 IPv6,现在已经有不少应用需求,建议配置为,并选中配置菜单中的全部选项,在需要的时候再插入模块。
特别说明一下CAN的配置选项。CAN-Bus 相关协议支持以及 CAN 设备驱动配置项都在这里,并没有将 CAN 设备驱动放在 drivers 配置菜单中。CAN-Bus 子系统配置界面如图
1.15 所示。
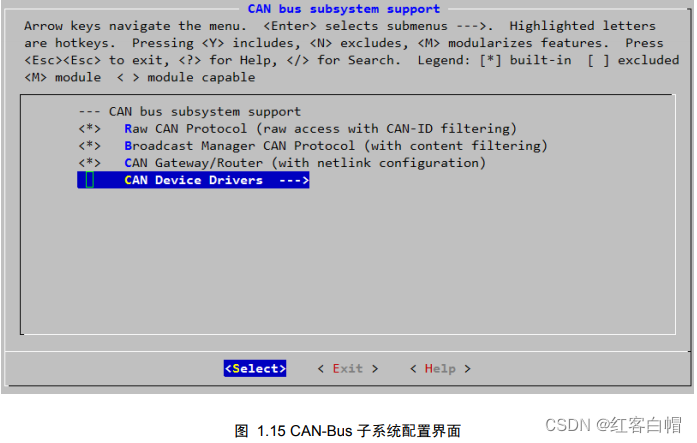
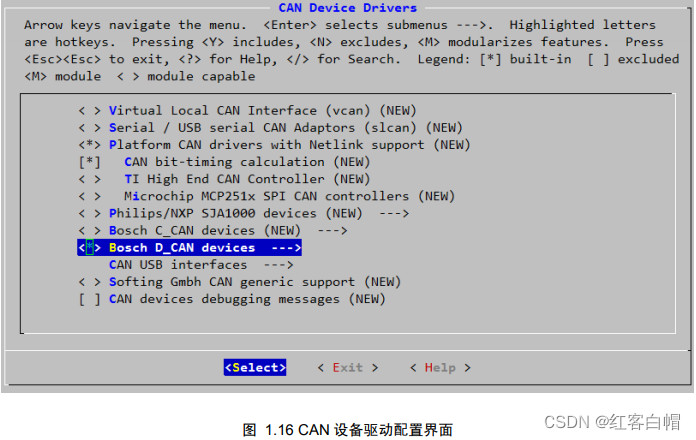
其中的“CAN Device Drivers”子菜单下可选择具体的 CAN 设备,如图 1.16 所示。具体选择哪个 CAN 设备驱动,与具体的硬件平台相关。
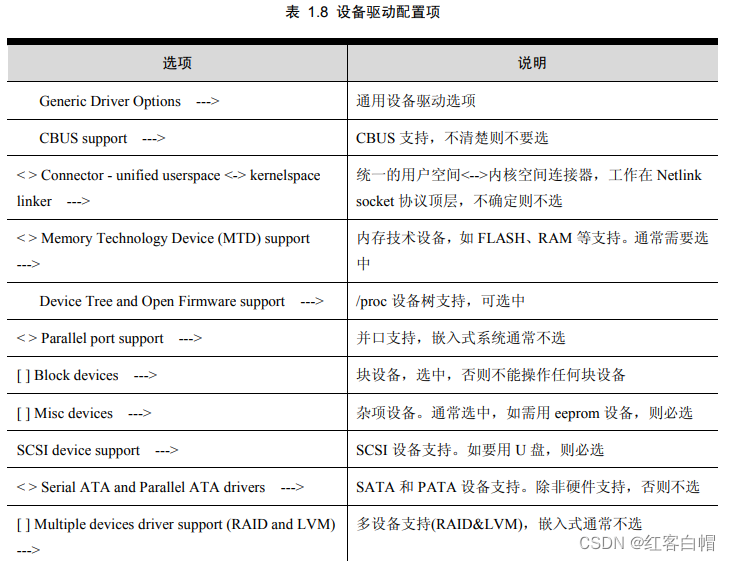
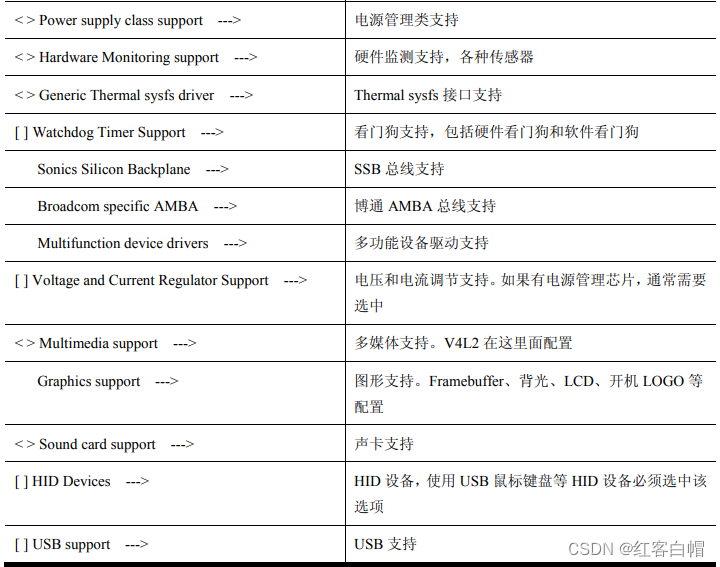
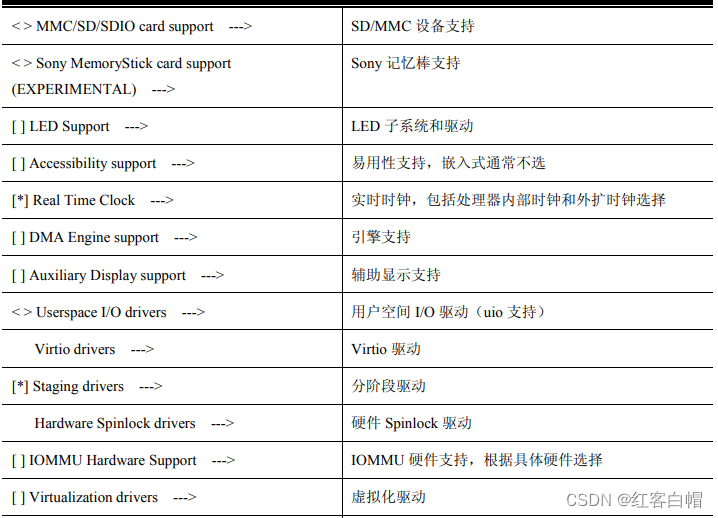
5. 设备驱动
Linux 内核支持众多外设,设备驱动程序很多,配置界面也很复杂,有众多配置项,如 表 1.8 所列。

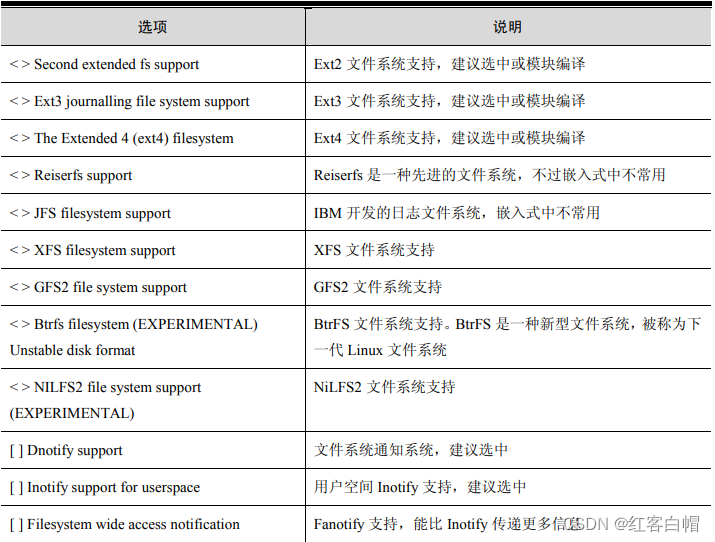
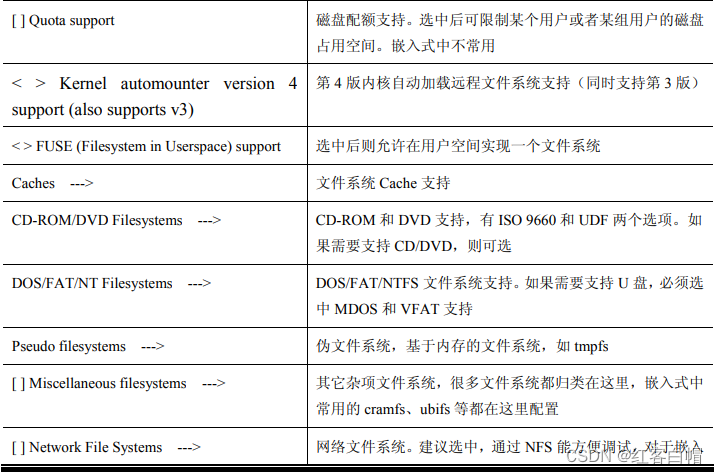
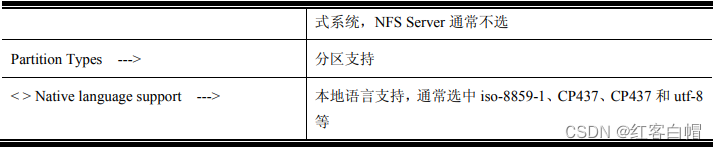
6. 文件系统
进入 File systems,是内核文件系统配置界面,可以看到很多文件系系统配置选项,如 图 1.17 所示。
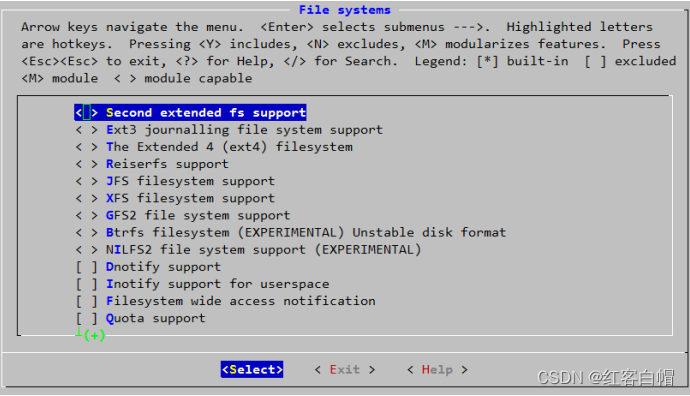
一个完整的嵌入式 Linux 系统往往会支持多种文件系统,但绝非“File systems”菜单下的全部。这里仅对当前主流系统比较常用的一些文件系统配置项进行介绍,如表 1.9 所列。
【1.6.3】 编译内核
内核配置完成,输入 make 命令即可开始编译内核。如果没有修改 Makefile 文件并指定 ARCH 和 CROSS_COMPILE参数,则须在命令行中指定:
- < > PWM Support --->
- < > PWM Support ---> -j8
如果编译不出错,编译完成,会生成 vmlinux、Image、zImage 等文件,各文件说明如 表 1.10 所列。
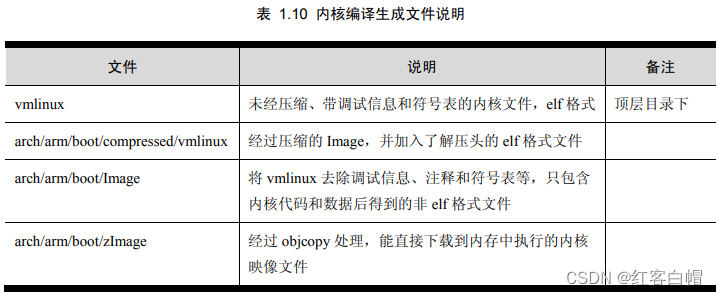
1. zImage
zImage是通常情况下默认的压缩内核,可以直接加载到内存地址并开始执行。它从 文件经过 objcopy 处理得到。在 ARM Linux 下最终生成 zImage 的各个参数记录在文件中。AM3352 内核生成 zImage 的
实际参数为:
- config NR_CPUS
- int "Maximum number of CPUs (2-32)"
- range 2 32
- depends on SMP
- default "4"
说明 2:如果在 64 位 ubuntu 下编译 Linux 内核,在编译过程中很有可能出现
“arm-fsl-linux-gnueabi/bin/as: error while loading shared libraries: libz.so.1: cannot open shared object file: No such file or directory”这样的错误,这是因为没有正确安装libz库所致,
可“sudo apt-get install zlib1g:i386”命令安装解决。
2. uImage
对于 ARM Linux 系统,大多数采用U-Boot引导,很少直接使用 zImage 映像,实际上更多的是 uImage。uImage 是 U-Boot 默认采用的内核映像文件,它是在 zImage 内核映像之前加上了一个长度为 64 字节信息头的映像。这 64 字节信息头包括映像文件的类型、加载位置、生成时间、大小等信息(可参考 U-Boot 源码文件的 image_header_t 数据结构定义)。进入目录,用 ls 命令查看,uImage 文件大小比 zImage 大 64字节:
- obj-$(CONFIG_BAR) += file_bar.o
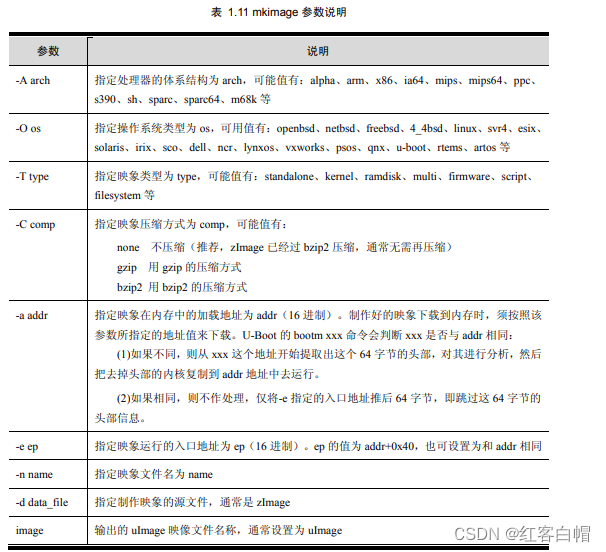
3. mkimage 工具
从zImage生成uImage需要 用到 mkimage 工具。该工具可在编译 U-Boot 源码后从 tools 目录下获得,复制到系统/usr/bin 目录即可;对于 Ubuntu 系统,还可用 sudo apt-get install u-boot-tools 命令安装得到。进入 mkimage 文件所在目录执行该文件,或者在安装 mkimage 工具后,直接在终端输入 mkimage 命令,可以得到 mkimage 工具的用法:
- #if defined (CONFIG_BAR)
- 实际处理代码
- #endif
- #if defined (CONFIG_BAR) || defined (CONFIG_BAR_MODULE)
- 实际处理代码
- #endif
对于EPC-28x处理器,内存起始地址为 0x40000000,从 zImage 生成 uImage 映像文件的命令实际操作范例:
- quiet_cmd_uimage = UIMAGE $@
- cmd_uimage = $(CONFIG_SHELL) $(MKIMAGE) -A arm -O linux -T kernel \
- -C none -a $(LOADADDR) -e $(STARTADDR) \
- -n 'Linux-$(KERNELRELEASE)' -d $< $@
mkimage 除了可以制作 uImage 映像文件之外,还可以查看一个 uImage 映像文件的文件头信息,用法:
- $ cp .config config-bak
- $ cp config-bak .config
成规则:
- $ make m3352_defconfig 或者
- $ make ARCH=arm CROSS_COMPILE= arm-linux-gnueabihf- m3352_defconfig
- < > PWM Support ---> -j8 uImage
- ( ) Use bootloader kernel arguments if available
- ( ) Extend bootloader kernel arguments
- ( ) Always use the default kernel command string
如果内核中有配置为的模块或者驱动,需要在编译内核后再通过 make modules 命 令编译这些模块或者驱动:
- < > PWM Support ---> modules
有的模块编译得到单一的“.ko”文件,且不依赖于其它模块,这样的模块可以直接用insmod 命令插入系统而不会出现错误。
有的模块则可能编译后得到多个“.ko”文件,或者依赖于其它模块文件,且各文件插入还有顺序要求,这就是常说的模块依赖。对于这样的情况,用 insmod 命令手工尝试得到依赖关系,然后按顺序插入也是可以的,但不推荐这样做,毕竟很麻烦。
建议编译模块后,再通过 make modules_install 命令安装模块,可将编译得到的全部模块安装到某一目录下,并且还会生成模块的依赖关系文件。默认情况下会将内核模块安装到编译机器的“/”目录下,这一方面需要root权限,另一方面容易与主机文件混淆。建议通过INSTALL_MOD_PATH参数指定模块安装路径:
- $ make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabi-

所有的内核模块都在kernel目录下,modules.dep 是全部模块的依赖关系文件。将“lib/modules/内核版本/”复制到目标系统后根目录后,就可以用 modprobe 命令进行模块安装,而不用手工逐一加载各个模块。该文件内容多少与内核模块多少相关,现在摘取一个实例片段进行说明:
- $ make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabi- -j8
- cmd_arch/arm/boot/zImage := /home/ctools/i686-arago-linux/usr/bin/arm-linux-gnueabihf-objcopy -O binary
- -R .comment -S arch/arm/boot/compressed/vmlinux arch/arm/boot/zImage
- $ cd arch/arm/boot
- $ ls -la Image zImage uImage
- -rwxrwxr-x 1 chenxibing chenxibing 6460852 Jul 25 09:24 Image
- -rw-rw-r-- 1 chenxibing chenxibing 3135544 Jul 25 09:24 uImage
- -rwxrwxr-x 1 chenxibing chenxibing 3135480 Jul 25 09:24 zImage
- $ ./mkimage 或者 mkimage
- Usage: ./mkimage -l image
- -l ==> list image header information
- ./mkimage [-x] -A arch -O os -T type -C comp -a addr -e ep -n name -d data_file[:data_file...] image
- -A ==> set architecture to 'arch'
- -O ==> set operating system to 'os'
- -T ==> set image type to 'type'
- -C ==> set compression type 'comp'
- -a ==> set load address to 'addr' (hex)
- -e ==> set entry point to 'ep' (hex)
- -n ==> set image name to 'name'
- -d ==> use image data from 'datafile'
- -x ==> set XIP (execute in place)
- ./mkimage [-D dtc_options] -f fit-image.its fit-image
- ./mkimage -V ==> print version information and exit
- $ mkimage [-x] -A arch -O os -T type -C comp -a addr -e ep -n name -d data_file[:data_file...] image
得到 uImage 映像文件后,将 uImage 加载到内存地址ep-0x40处,通过 bootm 命令即可 运行内核:
- $ mkimage -A arm -O linux -T kernel -C none -a 0x40008000 -e 0x40008000 -n 'Linux-2.6.35' -d
- arch/arm/boot/zImage arch/arm/boot/uImage
- $ mkimage -l uImage_file
从零开始配置内核是不明智的,建议在某一个默认配置的基础上进行修改,以达到自己 产品的实际需求。 裁剪和配置内核的基本原则:
- $ mkimage -l uImage
- Image Name: Linux-2.6.35.3-571-gcca29a0-g191
- Created: Tue Nov 17 11:57:47 2015
- Image Type: ARM Linux Kernel Image (uncompressed)
- Data Size: 2572336 Bytes = 2512.05 kB = 2.45 MB
- Load Address: 40008000
- Entry Point: 40008000
【1.7.1】 GPIO 子系统配置
Linux 2.6 以上内核引入了子系统, GPIO 子系统将全部 GPIO 的操作接口都通过 “/sys/class/gpio/” 目录导出,非常方便用户使用。 输入下列命令,进入内核配置菜单:
- obj-$(CONFIG_WDT) += wdt.o # wdt.c 编译控制
- obj-$(CONFIG_PCI) += pci/ # pci 目录编译控制
- $ make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabi- -j8 uImage
- cmd_arch/arm/boot/uImage := /bin/bash /home/vmuser/prj/m28x/kernel/linux-2.6.35.3/scripts/mkuboot.sh -A arm
- -O linux -T kernel -C none -a 0x40008000 -e 0x40008000 -n 'Linux-2.6.35.3-571-gcca29a0-g1914ba0' -d
- arch/arm/boot/zImage arch/arm/boot/uImage
- $ make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabi- modules
【1.7.2 】LED 子系统配置
Linux LED 子系统提供了“/sys/class/leds/”的访问接口,启用 LED 子系统能很方便地 操作系统的 LED 资源。
在“Device Drivers”配置界面,选中“LED Support”支持:
- $ make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabiINSTALL_MOD_PATH=/home/chenxibing/work/rootfs
- modules_install
- kernel/drivers/net/bonding/bonding.ko: (1)
- kernel/drivers/usb/serial/usbserial.ko: (2)
- kernel/drivers/usb/serial/ftdi_sio.ko:kernel/drivers/usb/serial/usbserial.ko (3)
【1.7.3】 串口配置
串口是嵌入式 Linux 必不可少的外设,默认控制台通常就是串口,所以必须在内核中使能串口以及串口控制台支持。
在“Device Drivers”配置界面,选择“Character devices”:
- # insmod kernel/drivers/net/bonding/bonding.ko
- VERSION = 2
- PATCHLEVEL = 6
- SUBLEVEL = 35
- EXTRAVERSION =3 Serial drivers ---> [ ] ARM JTAG DCC console
- # indmod kernel/drivers/usb/serial/usbserial.ko
- # insmod kernel/drivers/usb/serial/ftdi_sio.ko
USB 可以外接多种设备,不同设备的驱动配置也是不同的。下面以常用的 U 盘、USB鼠标键盘配置为例进行介绍。
1. 使用 U 盘
U 盘在 Linux 系统下被认为是 SCSI 设备,所以必须在内核中选择支持 SCSI。在主菜单 界面选择“Device Drivers”,进入设备驱动配置界面,选择“SCSI device support”:
- # modprobe ftdi_sio
- # tftp 40007fc0 uImage
- # bootm 40007fc0
- ## Booting kernel from Legacy Image at 40007fc0 ...
- Image Name: Linux-2.6.35.3-571-gcca29a0-gd43
- Image Type: ARM Linux Kernel Image (uncompressed)
- Data Size: 2653928 Bytes = 2.5 MB
- Load Address: 40008000
- Entry Point: 40008000
- Verifying Checksum ... OK
- Loading Kernel Image ... OK
- OK
- Starting kernel ...
- Uncompressing Linux... done, booting the kernel.
- ……
- 以下省略
- 基于某一个最接近的主板配置来修改;
- 必须的、能确定的选项选中;
- 不能确定的则不要改变原来配置;
- 可选可不选的,建议根据 help 信息决定或者不选;
- 一次改动不要太多,渐进式修改和验证;
- 注意及时备份配置文件,出现意外可以回退恢复。
- $ make ARCH=arm menuconfig
- [*] Networking support --->
- Device Drivers --->
- File systems --->
- Kernel hacking --->
2. 使用 USB 键盘和鼠标
使用 USB 键盘或者鼠标,需要在内核中使能 HID 支持。在“Device Drivers”菜单界面,选中“HID Devices”:
- [*] SPI support --->
- PPS support --->
- PTP clock support
- -*- GPIO Support --->
- <*> PWM Support --->
- --- GPIO Support
- [*] /sys/class/gpio/... (sysfs interface)
- *** Memory mapped GPIO drivers: ***
- <*> MMC/SD/SDIO card support --->
- < > Sony MemoryStick card support (EXPERIMENTAL) --->
- [*] LED Support --->
- [ ] Accessibility support --->
- --- LED Support
- [*] LED Class Support
- *** LED drivers ***
- ...
- [*] LED Trigger support
- *** LED Triggers ***
- <*> LED Timer Trigger
- <*> LED Heartbeat Trigger
- < > LED backlight Trigger
- <*> LED GPIO Trigger
- <*> LED Default ON Trigger
- Input device support --->
- Character devices --->
- -*- I2C support --->
USB Gadget 能通过 USB Device 实现诸如 U 盘模拟、USB 串口、USB 网卡等多种功能。 首先在内核配置使能“USB Gadget Support”:
- [*] /dev/kmem virtual device support
- Serial drivers --->
- [ ] ARM JTAG DCC console
- <M> 8250/16550 and compatible serial support
- *** Non-8250 serial port support ***
- <*> i.MXS debug serial port support
- <*> i.MXS Application serial port support
- [*] Block devices --->
- [*] Misc devices --->
- SCSI device support --->
- < > Serial ATA and Parallel ATA drivers --->
在“Device Drivers”菜单中使能“MMC/SD/SDIO card support”:
- < > RAID Transport Class
- <*> SCSI device support
- < > SCSI target support
- [*] legacy /proc/scsi/ support
- *** SCSI support type (disk, tape, CD-ROM) ***
- <*> SCSI disk support
- < > SCSI tape support
- < > SCSI OnStream SC-x0 tape support
- < > Sound card support --->
- [ ] HID Devices --->
- [*] USB support --->
- <*> MMC/SD/SDIO card support --->
- --- USB support
- <*> Support for Host-side USB
- [*] USB device filesystem (DEPRECATED)
- [*] USB device class-devices (DEPRECATED)
- [*] USB runtime power management (suspend/resume and wakeup)
- <*> EHCI HCD (USB 2.0) support
- [*] Support for Freescale controller
- [*] Support for Host1 port on Freescale controller
- [*] Support for DR host port on Freescale controller
- [*] Root Hub Transaction Translators
配置网卡首先要在主菜单中使能网络,即选中“Networking support”:
- …
- <*> USB Mass Storage support
- [ ] USB Mass Storage verbose debug
- File systems --->
- DOS/FAT/NT Filesystems --->
- <*> MSDOS fs support
- <*> VFAT (Windows-95) fs support
- (437) Default codepage for FAT
- (iso8859-1) Default iocharset for FAT
- < > NTFS file system support
- <*> Sound card support --->
- [*] HID Devices --->
- [*] USB support --->
- <*> MMC/SD/SDIO card support --->
- --- HID Devices
- -*- Generic HID support
- [ ] /dev/hidraw raw HID device support
- *** USB Input Devices ***
- <*> USB Human Interface Device (full HID) support
- [ ] PID device support
- [ ] /dev/hiddev raw HID device support
- Special HID drivers --->
- < > Telephony support --->
- Input device support --->
- Character devices --->
- -*- I2C support --->
使用 NFS 文件系统,首先需要保证网卡可用,且在内核已经配置了网卡。在“File system”配置界面使能“Network File Systems”并进行配置:
- < > Joystick interface
- <*> Event interface
- < > Event debugging
【1.7.9】 PPP 拨号配置
PPP 拨号配置,在“Device Drivers”的“Network device support”菜单下。选中并使能“PPP (point-to-point protocol) support”及子选项即可使用 PPP 拨号功能。这里以模块方式编译:
- `当然,还需要 USB Host 支持,参考前面“使用 U 盘”配置部分配置好 USB 控制器。
- 保存配置并编译内核,使用新内核的系统即可支持 USB 键盘和鼠标。`
- Device Drivers --->
- [*] USB support --->
- <*> USB Gadget Support --->
- <*> USB Peripheral Controller (Inventra HDRC USB Peripheral (TI, ADI, ...)) --->
在内核配置主菜单界面,进入“Device Drivers”界面,选择“Memory Technology Device (MTD) support”:
- <M> USB Gadget Drivers
- < > Gadget Zero (DEVELOPMENT)
- < > Audio Gadget (EXPERIMENTAL)
- <M> Ethernet Gadget (with CDC Ethernet support)
- [*] RNDIS support
- ...
- <M> File-backed Storage Gadget (DEPRECATED)
- [ ] File-backed Storage Gadget testing version
- <M> Mass Storage Gadget
- < > Serial Gadget (with CDC ACM and CDC OBEX support)
- Device Drivers --->
- <*> MMC/SD/SDIO card support --->
- --- MMC/SD/SDIO card support
- ...
- *** MMC/SD/SDIO Card Drivers ***
- <*> MMC block device driver
- (8) Number of minors per block device
- [*] Use bounce buffer for simple hosts
- < > SDIO UART/GPS class support
- < > MMC host test driver
- *** MMC/SD/SDIO Host Controller Drivers ***
- ...
- [*] Freescale i.MX Secure Digital Host Controller Interface
- <*> MXS MMC support
- File systems --->
- <*> Second extended fs support
- <*> Ext3 journalling file system support
- <*> The Extended 4 (ext4) filesystem
UBIFS 是工作于 UBI 子系统之上的文件系统,而 UBI 又工作于 MTD 设备上,所以首先需要在 MTD 中使能 UBI:
- Power management options --->
- [*] Networking support --->
- Device Drivers --->
- File systems --->
- 为了正常使用网络,通常还需在“`Networking options`”中配置 `TCP/IP`:
- [*] Networking support --->
- Networking options --->
- <*> Packet socket
- <*> Unix domain sockets
- < > PF_KEY sockets
- [*] TCP/IP networking
- [*] IP: multicasting
- [ ] IP: advanced router
- [*] IP: kernel level autoconfiguration
- [*] IP: DHCP support
- [*] IP: BOOTP support
- [*] IP: RARP support
前面已经提到过,CAN 设备驱动的配置路径不在“Devie Drivers”下,而是在“Networking support”中。进入内核配置主菜单,选择“Networking support”:
- …
- <*> USB Mass Storage support
- [ ] USB Mass Storage verbose debug
- [*] --- Ethernet (10 or 100Mbit) --->
- …
- <*> FEC ethernet controller (of ColdFire and some i.MX CPUs)
- [*] Second FEC ethernet controller (on some ColdFire CPUs)
- File systems --->
- [*] Network File Systems --->
- <*> NFS client support
- [*] NFS client support for NFS version 3
- [*] NFS client support for the NFSv3 ACL protocol extension
- [*] NFS client support for NFS version 4
- [*] NFS client support for NFSv4.1 (EXPERIMENTAL)
- [*] Root file system on NFS
- Device Drivers --->
- [*] Network device support --->
- <M> PPP (point-to-point protocol) support
- <M> PPP BSD-Compress compression
- <M> PPP Deflate compression
- [*] PPP filtering
- <M> PPP MPPE compression (encryption) (EXPERIMENTAL)
- [*] PPP multilink support (EXPERIMENTAL)
- <M> PPP over Ethernet (EXPERIMENTAL)
- <M> PPP support for async serial ports
- <M> PPP support for sync tty ports
从 EPC-28x光盘内获取内核源码包EPC-28x.xxxxx.tar.bz2,然后把它拷贝到Ubuntu 下面,执行如下步骤:
1. 解压缩
- #insmod slhc.ko
- #insmod ppp_generic.ko
- #insmod pppox.ko
- #insmod pppoe.ko
2. 编译内核
EPC-28x 内核源码的 Makefile 文件内已经配置好了 ARCH 和 CROSS_COMPILE,所以 在 make 时无需指定ARCH 和CROSS_COMPILE。 EPC-28x 的源码已经包含配置好的.config 文件,无需 makemenuconfig 配置即可使用默 认配置,除非需要改动内核配置。
- 插入模块后,生成/dev/ppp 设备节点,通过 ppp 拨号脚本即可进行拨号了。
- < > Connector - unified userspace <-> kernelspace linker --->
- <*> Memory Technology Device (MTD) support --->
- Device Tree and Open Firmware support --->
- < > Parallel port support --->

免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作!
| 欢迎光临 IT评测·应用市场-qidao123.com (https://dis.qidao123.com/) | Powered by Discuz! X3.4 |