对于我们的 TO,我们假设一个简化的机器人模子,其中的足式机器人是无质量的。单个浮体具有机器人的总质量和与默认构型相对应的惯性。此外,我们将车轮建模为平面、不可变形的圆盘。
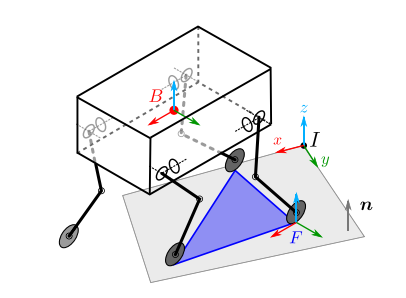
图 2 阐明了我们分别对惯性系、基座系和脚坐标系 I、B 和 F 的定义。在轮式脚的环境下,F 的运动在站立过程中受到运动学滚动束缚。由于我们在《盘算模子》中同时求解平面基座和脚的运动轨迹,但力求制止非线性束缚,因此需要满意以下条件: F 的运动学束缚必须不依赖于其与底座的相对位置。对于传统的点接触脚来说,由于它在站立过程中是固定的,因此这一点很容易满意。然而,对于车轮来说,这就对运动造成了限定。对于装有不可转向轮子的 ANYmal [1],如果底座俯仰角相对于惯性坐标系(w.r.t)为零,则满意条件。附录中对此有进一步概述。
图 2. 轮式四足机器人的模子,它的足式机器人是无质量的,轮子是平面的、不可变形的。当前的支持多边形用蓝色阴影表示。I 表示惯性坐标系,z 轴与地平面法线 n 相平行;B 表示基本坐标系,原点位于机器人的 CoM。我们将坐标系 F 固定在一条腿的端点,即站立时与地面接触的点(仅显示左后腿),并将该点定义为一条腿的足式。这个定义对我们的环境很有用,因为我们只需改变 F 处的运动学束缚,就能模拟传统的点接触脚和轮子。也就是说,通过定义 F 的 Z 轴与平面法线对齐,X 轴与车轮旋转轴垂直,两者之间的区别就只在于 F 是否可以沿其 X 轴方向具有非零速率分量。
A. 级联轨迹生成
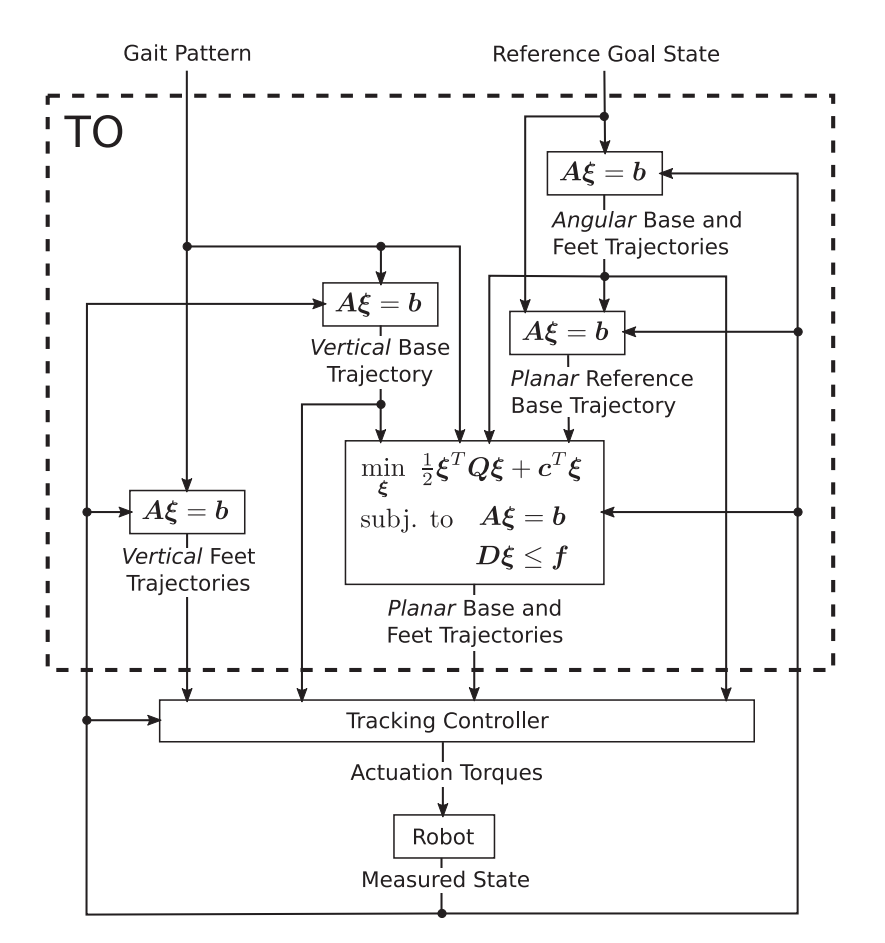
图 3 显示了我们的 TO 的完整架构。高层输入是步态4 和由线性和角度基础位置和/或速率组成的参考目标状态。如果步态模式包含完整的飞行阶段,即全部足式腿都处于摆动阶段,则会盘算出基座 z 分量的时变轨迹,其中包含这些弹道自由落体阶段。目标状态用于盘算角度轨迹和平面参考基座轨迹。或者,这些也可以由高级路径规划器等直接提供。由于脚的垂直运动并不影响优化,因此我们将其分开盘算,通过五次多项式对每个摆动阶段举行参数化。为了跟踪轨迹和盘算驱动扭矩,可以利用满身控制器(WBC),例如 [24] 中形貌的控制器。
其中,m 表示机器人的质量,ΘB 表示机器人的惯性张量,g 表示重力矢量,Fext 和 Γext 表示作用在 CoM 上的外力和力矩。左侧的下标表示这些量在哪个坐标系中表示。符号 a、v、r 和 ω 分别表示线性加速率、速率、位置和角速率。例如,I rB F 是以 I 表示的 F 相对于 B 的位置矢量。
对于平展的地面,ZMP 被定义为地面上的一点,在这一点上,重力惯性力引起的力矩--即 (1) 的左手边(LHS)--只有平面法线 n 方向上的一个分量。
其中,RI B 是惯性坐标系到基准坐标系的被动旋转矩阵,即 I r = RIB B r。由于我们让惯性坐标系的 Z 轴与平面法线重合,因此 (2) 可以求解 ZMP 的 x、y 分量,即
其中,zB 和 gz 分别是 I rI B 和 I g 的 z 分量,(-)xy 表示量的平面分量。角度分量的盘算公式为
其中 RIB,i 表示 RI B 的第 i 行。留意,当 zB 不变时,(3) 表示以 ZMP 为支点的线性倒立摆的运动方程 (EoM)
为了实现动态平衡,规划的 ZMP 必须始终位于支持多边形内 [10]。在优化过程中,这一标准采用多面体束缚的情势。由于束缚边的方向取决于脚的位置或辅助优化变量(如文献[6]),因此在同时求解脚和底座轨迹时,这些束缚都黑白线性的。因此,要获得线性束缚,必须事先固定边沿方向。如图 4 所示,我们建议在三足式支持阶段这样做。也就是说,我们要求脚位于一组具有固定方向的直线所跨过的凸锥中,这些直线在 ZMP 处相交,使得后者始终包含在所得到的支持多边形中。
这种线性化的紧张缺点是,它将优化变量限定在满意 ZMP 平衡准则的变量子集中,因此需要细致选择边沿方向,以获得可行的优化问题。直观地说,这个子集的特点是每条边会损失一个旋转自由度(DoF)。
我们发现,将触地时站立脚的足式髋关节位置毗连起来,选择边沿方向的效果很好。也就是说,我们从一组六个方向向量开始--每对脚的组合各一个 -- 每当一只脚从摆动切换到站立时,我们就将该脚的髋关节位置与全部其他站立脚的髋关节位置毗连起来,重新盘算相关的方向。这一过程可确保在非零偏航运动中,一对落地脚的方向在惯性坐标系中保持不变。否则,在包含双脚支持阶段的纯步行步态中,问题将变得不可行。出于同样的缘故原由,我们通过毗连测量到的脚的位置而不是髋部来初始化初始接地脚对的边沿方向。
三、轨迹优化
我们将探求双脚和底座轨迹的 x、y 分量的任务表述为一个 QP 问题,其情势为
其中,轨迹参数化变量堆叠在优化变量 ξ 向量中。下文将更详细地先容这种参数化方法,并先容有助于解决 QP 问题的目标和束缚条件。此外,我们还提出了一种热启动方案,并简要讨论了怎样通过求解线性方程组来生成作为 QP 问题输入的剩余轨迹。
A. 参数化